Goodrive350 series high-performance multi-function inverter Chapter 5
-92-
When this terminal is valid in stop state, switch to
closed-loop vector control.
Switching the output polarity of PID, this terminal should
be used in conjunction with P09.03
Zero out the position counting value
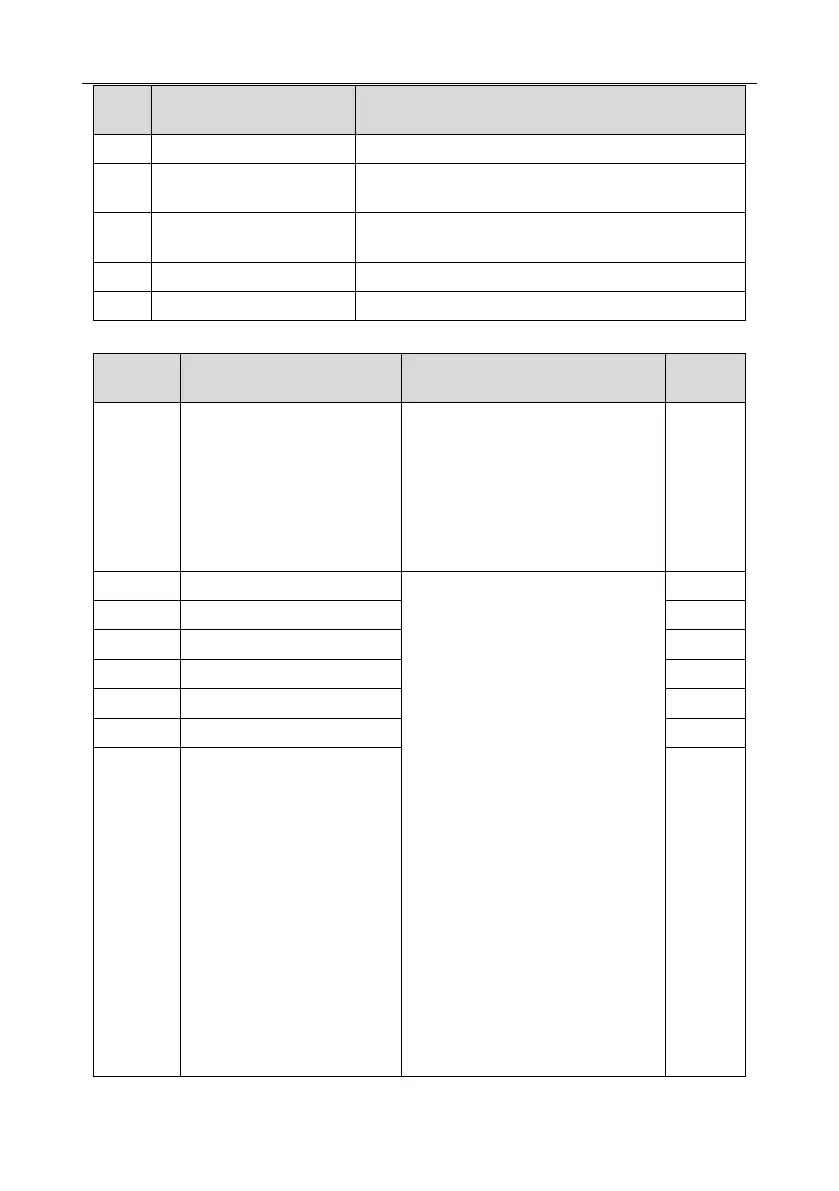
Related parameter list:
Detailed parameter description
0x00–0x11
Ones: HDIA input type
0: HDIA is high-speed pulse input
1: HDIA is digital input
Tens: HDIB input type
0: HDIB is high-speed pulse input
1: HDIB is digital input
0: No function
1: Forward running
2: Reverse running
3: Tri-line running control
4: Forward jogging
5: Reverse jogging
6: Coast to stop
7: Fault reset
8: Running pause
9: External fault input
10: Frequency increase (UP)
11: Frequency decrease (DOWN)
12: Clear frequency
increase/decrease setting
13: Switch-over between setup A and
setup B
14: Switch-over between
combination setting and A setting
15: Switch-over between
combination setting and setup B
16: Multi-step speed terminal 1
Function of HDIA terminal
Function of HDIB terminal

 Loading...
Loading...




