76
Appendix
ServoOne User Manual SERCOS II and III
ID no.: 1108.26B.3-00 Date: 04/2020
Appendix
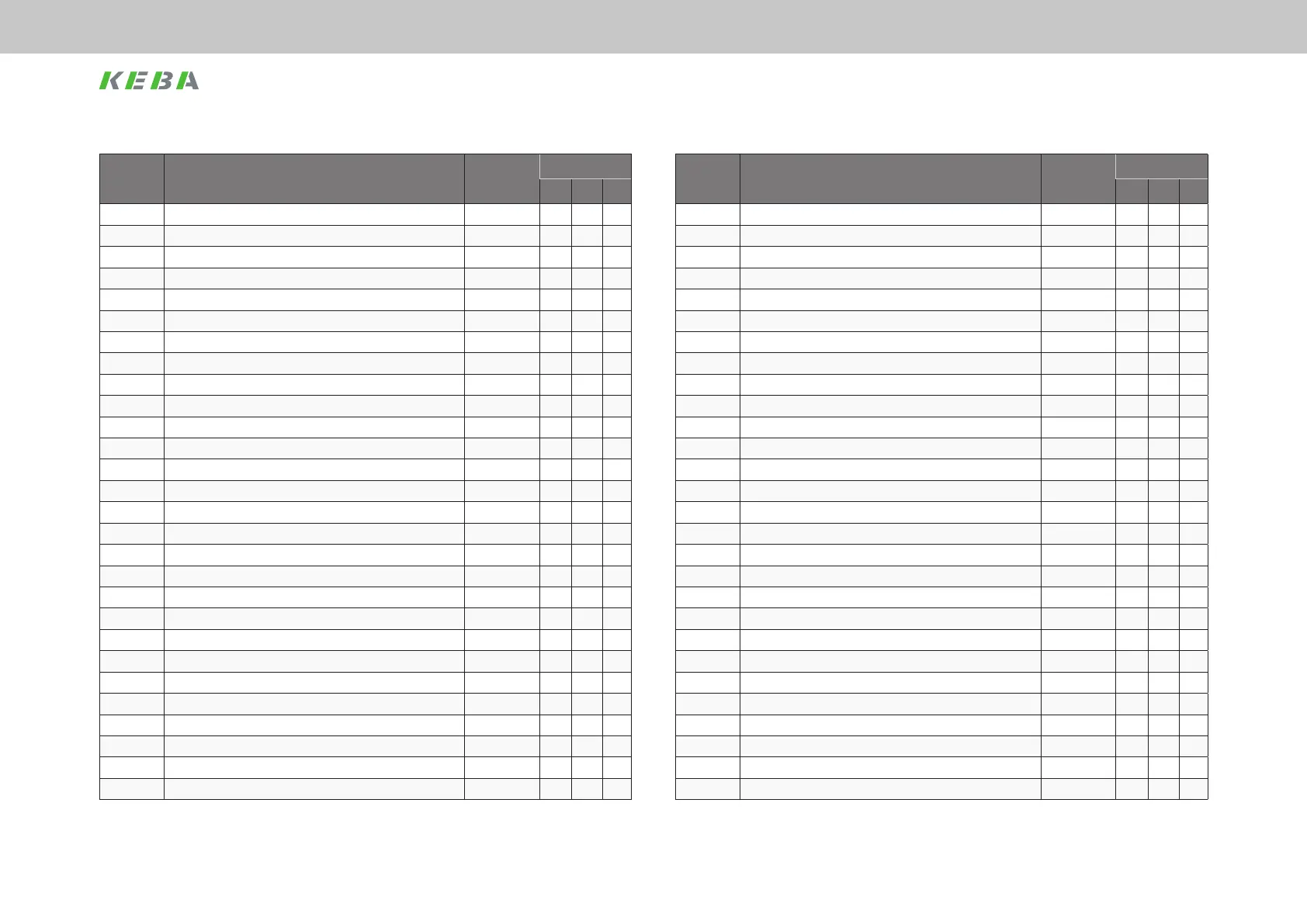
IDN Description Unit
Write-protection
CP2 CP3 CP4
P 0476 Motor rotor resistance Ohm x x
P 0477 Motor rotor resistance, scaling factor % x x
P 0500 ENC CH1: Actual value: SingleTurn[0], MultiTurn[1] x x x
P 0501 ENC CH2: Actual value: SingleTurn[0], MultiTurn[1] x x x
P 0502 ENC CH3: Actual value: SingleTurn[0], MultiTurn[1] x x x
P 0505 ENC CH1: Encoder type selection x x
P 0506 ENC CH2: Encoder type selection x x
P 0507 ENC CH3: Encoder type selection x x
P 0510 ENC CH1: Gear nominator x x
P 0511 ENC CH1: Gear denominator x x
P 0512 ENC CH2: Gear nominator x x
P 0513 ENC CH2: Gear denominator x x
P 0514 ENC CH3: Gear nominator x x
P 0515 ENC CH3: Gear denominator x x
P 0520 ENC: Channel selection for motor commutation x x
P 0521 ENC: Channel selection for speed control x x
P 0522 ENC: Channel selection for position control x x
P 0523 ENC: Channel selection for master input x x
P 0530 ENC: Channel selection as SERCOS encoder 1 x x
P 0531 ENC: Channel selection as SERCOS encoder 2 x x
P 0540 ENC CH1: Absolute position interface selection x x
P 0541 ENC CH1: Index pulse signal (test mode) x x
P 0542 ENC CH1: Number of lines (SinCos / TTL encoders) x x
P 0543 ENC CH1: Number of MultiTurn bits (SSI absolute) x x
P 0544 ENC CH1: Number of SingleTurn bits (SSI absolute) x x
P 0545 ENC CH1: Code selection (SSI absolute position interface) x x
P 0546 ENC CH1: Mode selection (SSI absolute position interface) x x
P 0547 ENC CH1: Lowest allowable MultiTurn position (SSI absolute) x x
Table 11.2 List of the SERCOS parameters supported
IDN Description Unit
Write-protection
CP2 CP3 CP4
P 0548 ENC CH1: Enable MultiTurn information (SSI absolute) x x
P 0549 ENC CH1: Signal correction type x x
P 0550 ENC CH1: Signal correction values x x
P 0551 ENC CH1: Encoder observation minimum, sqrt(a^2 + b^2) x x
P 0552 ENC CH1: Error and status codes of absolute encoders x x x
P 0553 ENC CH1: Length of an analog signal period (linear SinCos) nm x x
P 0554 ENC CH1: Length of an digital increment (linear absolute) nm x x
P 0560 ENC CH2: Number of pole pairs (Resolver) x x
P 0561 ENC CH2: Signal correction type x x
P 0562 ENC CH2: Signal correction values x x
P 0563 ENC CH2: Encoder observation minimum, sqrt(a^2 + b^2) x x
P 0570 ENC CH3: Absolute position interface selection x x
P 0571 ENC CH3: Index pulse signal (test mode) x x
P 0572 ENC CH3: Number of lines (SinCos / TTL encoders) x x
P 0573 ENC CH3: Number of MultiTurn bits (SSI absolute) x x
P 0574 ENC CH3: Number of SingleTurn bits (SSI absolute) x x
P 0575 ENC CH3:Code selection (SSI absolute position interface) x x
P 0577 ENC CH3: Encoder observation minimum, sqrt(a^2 + b^2) x x
P 0590 ENC: Axis correction, selection type x x
P 0591 ENC: Axis correction, start position x x
P 0592 ENC: Axis correction, end position x x
P 0593 ENC: Axis correction, delta position x x
P 0594 ENC: Axis correction, actual position value x x
P 0595 ENC: Axis correction, position table for negative speed x x
P 0596 ENC: Axis correction, position table for positive speed x x
P 0610 ENC CH1: Nominal increment of reference marks Signal per. x x
P 0630 ENC CH3: Nominal increment of reference marks Signal per. x x
P 0742 Monitoring maximum position difference POS
Table 11.2 List of the SERCOS parameters supported