Run/Idle Header: Yes
Configuration Assembly
Instance: 100
Size: 0 bytes
Requested Packet Interval (also called Expected Packet Rate)
20ms or greater for simultaneous use with Workbench, such as during commissioning
10ms or greater if simultaneous Workbench use is not required
IO Connection Type: Multicast, Class 1 Type
6.2.2 Command Assemblies
Command assemblies contain a control word and several fields used for setting values, requesting response
data, and commanding moves. A command assembly may be used to send one data command at a time (tar-
get position, target velocity, acceleration, deceleration or torque). The command type is specified in the Com-
mand Type field. A command assembly also specifies a Response Type, requesting a particular kind of data
in the response assembly.
A command assembly may contain both a Command Type and a Response Type to transmit a command and
request a particular response in the same assembly.
A valid Command Type is required to be set in each command assembly. Data outside the allowed range will
result in an Error Response Assembly.
The amplifier must be homed before motion is begun in position mode. Failure to home the amplifier will result
in a fault that must be cleared before amplifier operation can continue.
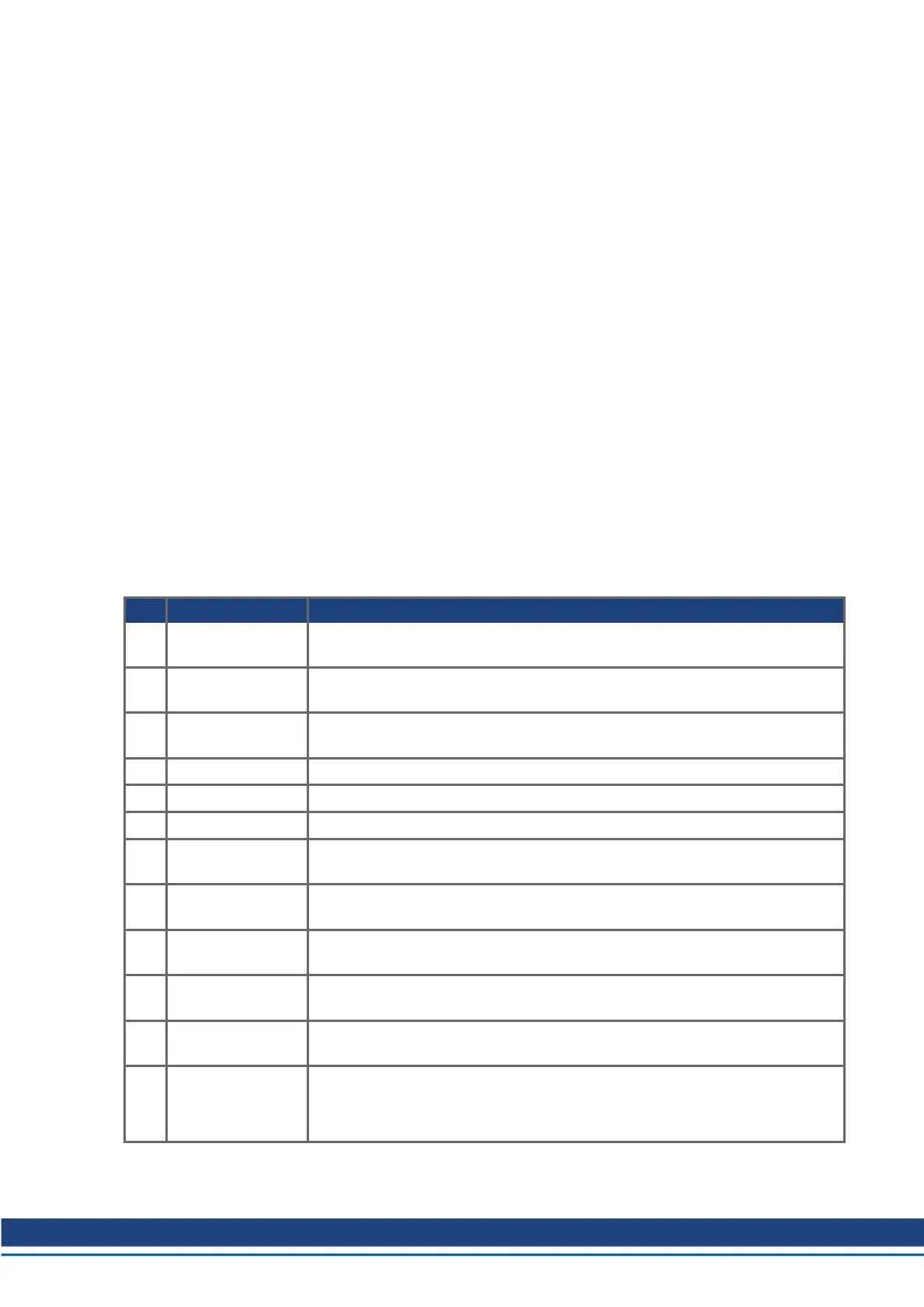
6.2.2.1 Command Assembly Data Structure
Byte Data Comment
0 Control Word The control word contains bits for enabling, moving, and handshaking with the
drive.
1 Block # The block number is used to start a particular Motion Task, in combination with
the Start Block bit in the Control Word.
2 Command Type Specifies the desired command to execute, such as Set Position or Set Para-
meter.
3 Response Type Specifies the desired response data to return in the Response Assembly.
4-7 Data The command data for most Command Types*
8-11 Position Position data for Command Type 6 (Position Move)*
12-
15
Velocity Velocity data for Command Type 6 (Position Move) and 7 (Jog)*
16-
19
Acceleration
Acceleration data for Command Type 6 (Position Move) and 7 (Jog)*
20-
23
Deceleration Deceleration data for Command Type 6 (Position Move) and 7 (Jog)*
24-
31
Parameter/Attribute
Data
Command Data for Command Type 0x1B (Set Position Controller Attribute) and
0x1F (Set Parameter)*
32 Attribute to Get Index of desired Position Controller Attribute value to return in the Response
Assembly bytes 24-31)
33 Map Type
0: Static Map (only bytes 0 to 35 are sent)
1: Custom Map 1
2: Dynamic Map (bytes 36-63 are dynamically configurable)
Ethernet/IP Communications | 6 Communication Profile
Kollmorgen | December 2014 11
 Loading...
Loading...









