Ethernet/IP Communications | 6 Communication Profile
l Load the desired attribute number of the Position Controller Object into byte 32 Attribute to Get.
l The value will be updated each communication cycle in bytes 24-31 of the response assembly.
6.2.3 Response Assemblies
In I/O Assembly Messaging, the amplifier transmits a response assembly back to the controller. The
response assembly has a number of pre-defined status words and data values. In addition, it can contain one
data value which is selected by the Response Type field of the command assembly.
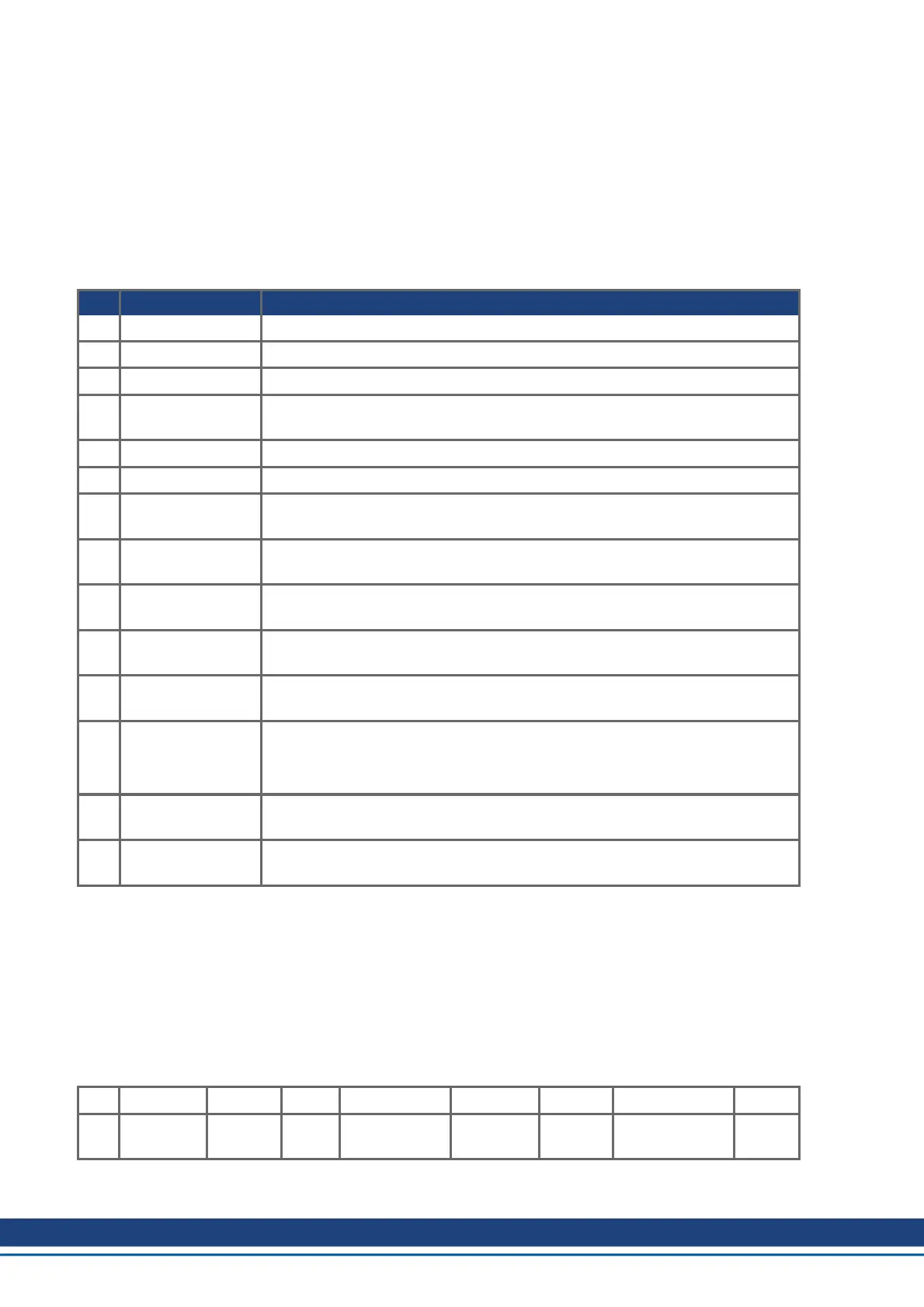
6.2.3.1 Response Assemly Data Structure
Byte Data Comment
0 Status Word 1 Various status bits
1 Executing Block # The index of the Motion Task which is currently being executed
2 Status Word 2 Various status bits
3 Response Type Specifies the response type of this assembly, echoing the Response Type set
in the command assembly.
4-7 Data The response data for most Response Types*
8-11 Position Actual Position*
12-
15
Velocity Actual Velocity*
16-
19
Motion Status Status bits. This provides the status word DRV.MOTIONSTAT. See the Para-
meter Reference Guide.
20-
23
Reserved
24-
31
Parameter/Attribute
Data
Response Data for Command Type 0x1F (Set Parameter) and the Attribute to
Get*
32 Attribute to Get Mirrors the Attribute to Get from the Command Assembly. If non-zero, the data
will be in the Parameter Data field.
33 Map Type
0: Static Map (only bytes 0 to 35 are sent)
1: Custom Map 1
2: Dynamic Map (bytes 36-63 are dynamically configurable)
34-
35
Reserved
36-
63
Response
Dynamic Map
See
EIP.RSPMAP (➜ p. 34)
.
* Least significant byte first for all data fields
Status 1, Status 2, Actual Position, Actual Velocity, and Motion Status data are updated in every response
assembly.
Data in bytes 4-7 will be updated depending on the value of the Response Type.
Parameter/Attribute Data in bytes 24-31 will be updated when Attribute to Get is non-zero or when a Get Para-
meter command was completed.
6.2.3.2 Status Word 1
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0 Enable
State
Reserved Homed Current Dir-
ection
General
Fault
In Pos-
ition
Block in Exe-
cution
In
Motion
14 Kollmorgen | December 2014

 Loading...
Loading...








