7.3 Parameter Class 0x0F
Most drive parameters can be read and or written through the Parameter Object. This includes many drive
parameters also available through the Position Controller and Position Controller Supervisor classes.
For an explicit message to the Parameter Object, the instance number of the desired parameter can be found
in Appendix B. See the Appendix for instance numbers, data types, and scaling. Note that Float types are
scaled by 1000 to get an integer value.
Attribute 1 of each parameter instance refers to the value of that parameter.
Amplifier commands such as MOVE.HOMEand DRV.NVSAVE are executed by sending a Set Value com-
mand with a data length of 1 and any value 0 to 255. Reading the value will not execute the process.
For example, send the following explicit message to initiate homing (HOME.MOVE, instance = 205):
[class=0x0F, instance=205, attribute=0x01, data length=1, data value=0x01].
7.3.1 Supported Attributes
The following attributes are supported for each parameter index:
1 – Get/Set parameter value
5 – Get data type
6 – Get data size
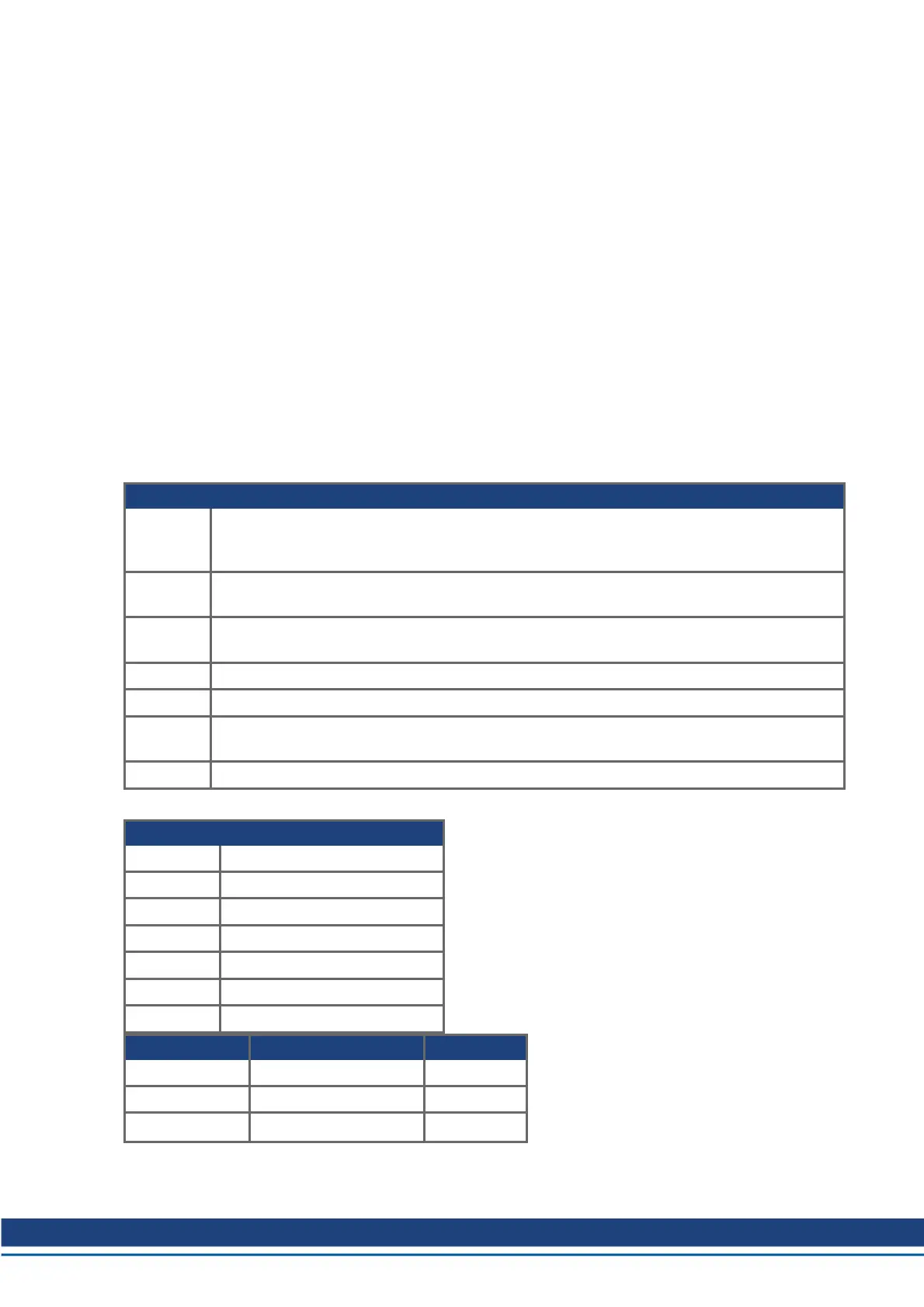
Attribute 0x01: Parameter Value
Description Directly access the parameter value. Check the command reference for the data type and
read/write access rule. Float types are multiplied by 1000 to get an integer value. Set the value
to 1 to execute an amplifier process (eg Move Home).
Access
Rule
Depends on the parameter and is given in ascii.chm in the Type field.
Data Type Depends on the parameter and is given in ascii.chm in the Format field. The byte length is
given by Data Length parameter.
Range N/A
Default N/A
Non-Volat-
ile
N/A
See Also N/A
Attribute 0x05: Data Type
Description This data type of this parameter.
Access Rule Get
Data Type U8
Range N/A
Default N/A
Non-Volatile Yes
See Also See table below
Data Type Code Data Type Abbreviation
0xC1 Boolean Bool
0xC2 Short Integer S8
0xC6 Unsigned Short Integer U8
Ethernet/IP Communications | 7 Drive Objects
Kollmorgen | December 2014 25
 Loading...
Loading...









