Lenze · 8400 "Position Sequencer" technology application · Software manual · DMS 1.0 EN · 07/2014 · TD05 27
3 Short setup of the technology application
3.8 Step 7 (optional): Set optimisation parameters
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
3.8 Step 7 (optional): Set optimisation parameters
The following application-specific parameters are used for optimisation and can also be adapted
during operation.
Tip!
Do not forget to save the parameter changes carried out with mains failure protection in
the memory module implemented! (C00002/11 = "1: on/start")
Stop!
If you change parameters in the »Engineer« during an online connection to the device,
the changes are directly transferred to the device!
Parameter
(Block)
Possible settings Info
Position controller
C00472/1
(LS_ParFree_a)
-199.99 % 199.99 Limitation of the position controller output
Lenze setting: 100 % reference speed
(C00011)
C00472/2
(LS_ParFree_a)
-199.99 % 199.99 Adaptation of the position controller gain
Lenze setting: 100 % Vp (C00254)
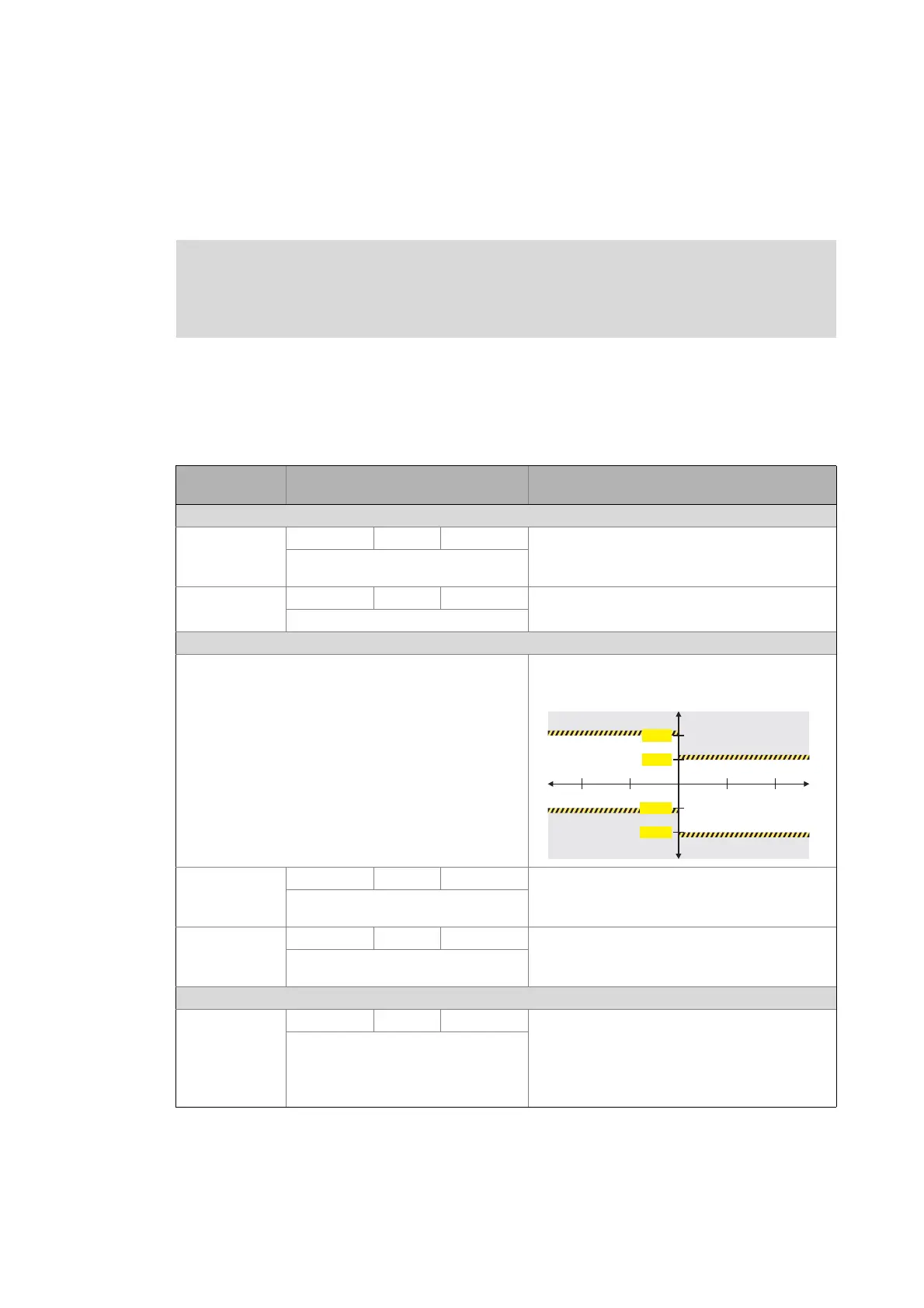
Torque limitation in motor mode/in generator mode
The torque limitation set is always active. Example: Definition of the torque limitations
C00472/3
(LS_ParFree_a)
-199.99 % 199.99 Torque limitation in motor mode
Lenze setting: 100 % maximum torque
(C00057)
C00472/4
(LS_ParFree_a)
-199.99 % 199.99 Torque limitation in generator mode
Lenze setting: 100 % maximum torque
(C00057)
Following error monitoring system
C01244/2...3
(LS_MotionControl
Kernel)
0 ms 600000 Waiting time for following error monitoring 1 & 2
• In order to avoid that an error is triggered by
acceleration and a narrow tolerance limit can be
nevertheless monitored at standstill in the target,
the response of the following error monitoring
system can be delayed by setting a waiting time.
Lenze setting: 0 ms
M
n
50 %
-100 % 100 %50 %
C00472/3 = 25 %
-50 %
25 %
-50 %
-25 %
C00472/4 = 50 %

 Loading...
Loading...








