Lite-On Technology Corp.
Industrial Automation
15
1.4. Operating mode
This drive provides numerous operating modes for the user. These modes are shown as follow:
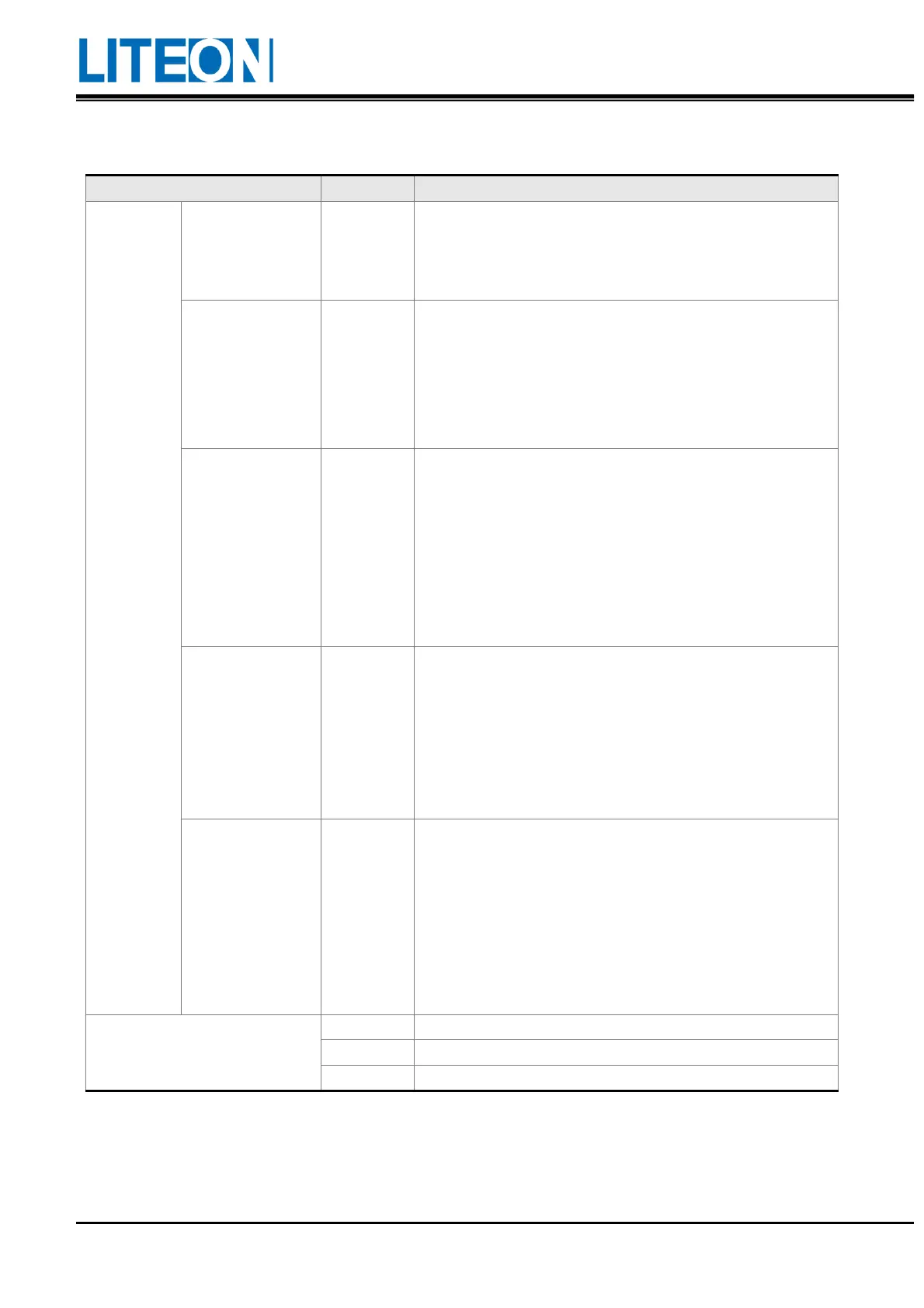
The drive receives the position command and controls
the motor to move to the target position.
The position command is input from the terminal block.
The signal type is pulse.
The drive receives the speed command and controls the
motor to reach the target rotational speed.
The internal register provides the speed command
(three registers available) or the external terminal block
inputs the analog voltage (-10V ~ +10V).
The command selection is based on the DI signal.
The drive receives the speed command and controls the
motor to reach the target rotational speed.
Speed mode
(no analog input)
The speed command can only be provided by the
internal register (three registers available). It can't be
provided by the external terminal block. The command
selection is based on the DI signal. The DI status of the
external input in the original S mode is the speed
command zero.
The drive receives the torque command and controls the
motor to reach the target torque.
The torque command can be provided by the internal
register (three registers available).
It is also possible to input the analog voltage from the
external terminal block (-10V ~ +10V).
The command selection is based on the DI signal.
The drive receives the torque command and controls the
motor to reach the target torque.
Torque mode
(no analog input)
The torque command can only be provided by the
internal register (three registers available). It can't be
provided by the external terminal block. The command
selection is based on the DI signal. The DI status of the
external input in the original T mode is the torque
command zero.
S and P can be switched via the DI signal.
T and P can be switched via the DI signal.
S and T can be switched via the DI signal.
The mode can be selected via the PA-01 parameter. After the new mode is set, the power is transmitted
to the drive. The new mode then becomes effective!
 Loading...
Loading...