24
5.1 MSOP Protocol
The data package outputs measured data such as the angle value, distance value,
intensity value, and timestamp of the point cloud. The data of the package
adopts Little-Endian mode.
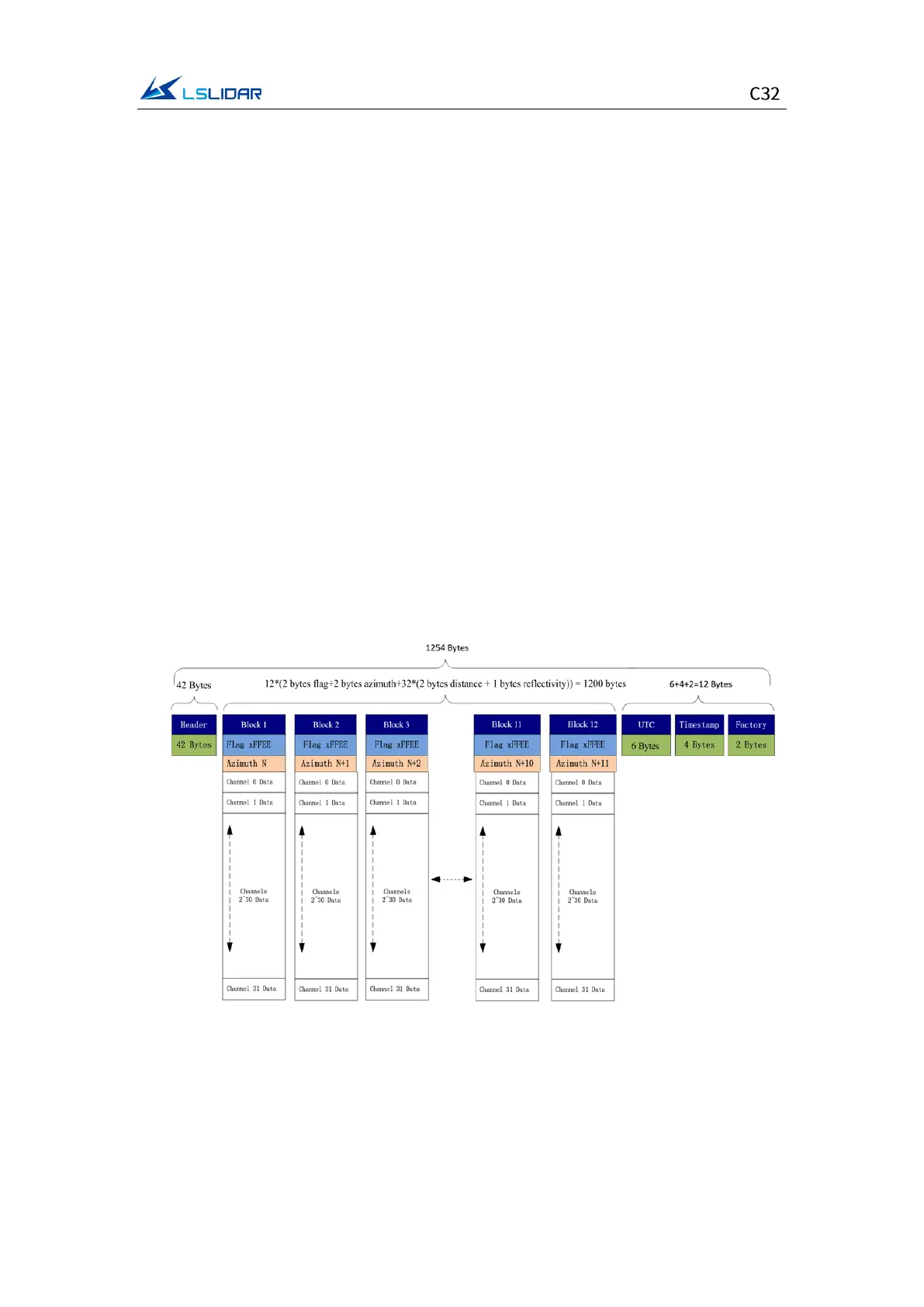
The data package includes a 42-byte Ethernet header and a 1212-byte payload,
with a total length of 1254 bytes. The payload consists of 1200 bytes of point
cloud data (12 data blocks of 100 bytes) and 12 bytes of additional information
(6 bytes of UTC, 4 bytes of Timestamp and 2 bytes of Factory).
5.1.1 Format
The C32 lidar supports single and dual echo modes. Single echo mode measures
the most recent echo value, and dual echo mode measures the most recent echo
and the second recent echo value.
In the single echo mode, one echo data is measured after a single-point laser
emission. A point cloud data package contains 12 data blocks, and each data
block contains 1 set of 32-channel point cloud data measured in the packing
order. Each data block returns only one azimuth angle. See the picture below:
Figure 5.1 Data Format of the Single Echo Mode
When dual echo mode is adopted, two echo data is measured after a single-
point laser emission. The data package contains 6 parity data block pairs, and
every 2 data blocks contain 1 set of two echo values of 32 channels measured
in the packing order. Block (1, 2) is the two echo data of the first 1 set of 32
point cloud data. The odd block is the first echo data, and the even block is the