Lidar Rotation / Stationary
PPS Alignment Horizontal Angle Value
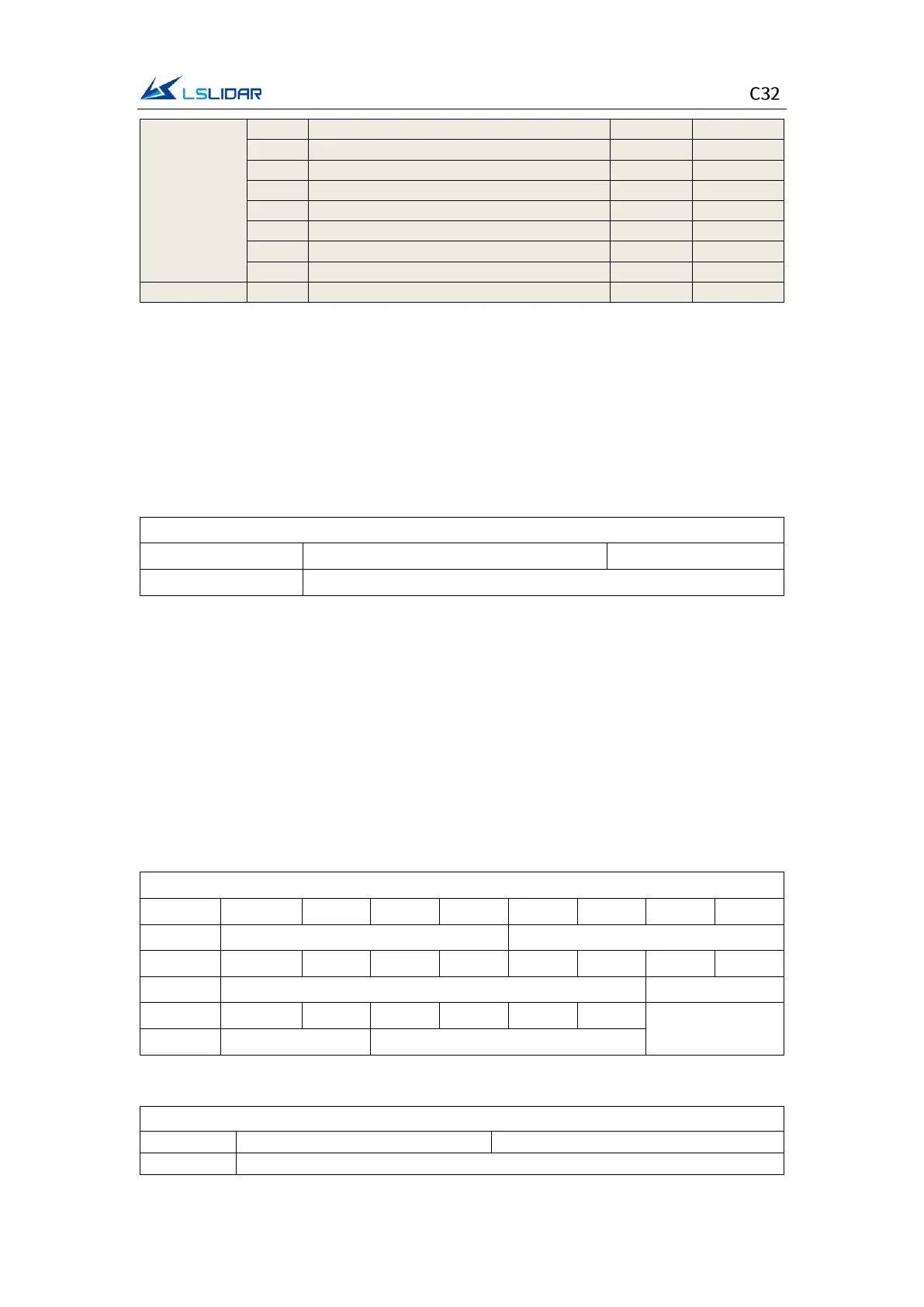
Header is the configuration packet identification header, which is fixed as 0xAA,
0x00, 0xFF, 0x11,0x22, 0x22, 0xAA, 0xAA, and the first 4 bytes are used as the
packet inspection sequence. The Tail of the frame is fixed at 0x0F, 0xF0.
5.3.1 Configuration Parameters and Status Description
Here below are the configuration parameters and status description of specific
lidar information.
Motor Speed
The motor rotates clockwise. Three speeds can be set: when it is set to 0x04B0,
the speed is 1200 rpm, 20 Hz; when it is set to 0x0258, the speed is 600 rpm,
10 Hz; when it is set to 0x012C, the speed is 300 rpm, 5 Hz. Other setting data
is not supported.
Ethernet Configuration
The length of the source IP address “IP_SRC” is 4 bytes and the length of the
destination IP address “IP_DEST” is 4 bytes. Each lidar has a fixed MAC address
“MAC_ADDR”, which cannot be configured by users. Port1 is the UDP data port
number and port2 is the UDP device port number. 4 bytes reserved.
Ethernet Configuration (22 bytes)
Lidar Rotation & Stationary
Lidar Rotation & Stationary (2 bytes)
0: Rotation;1: Stationary