40
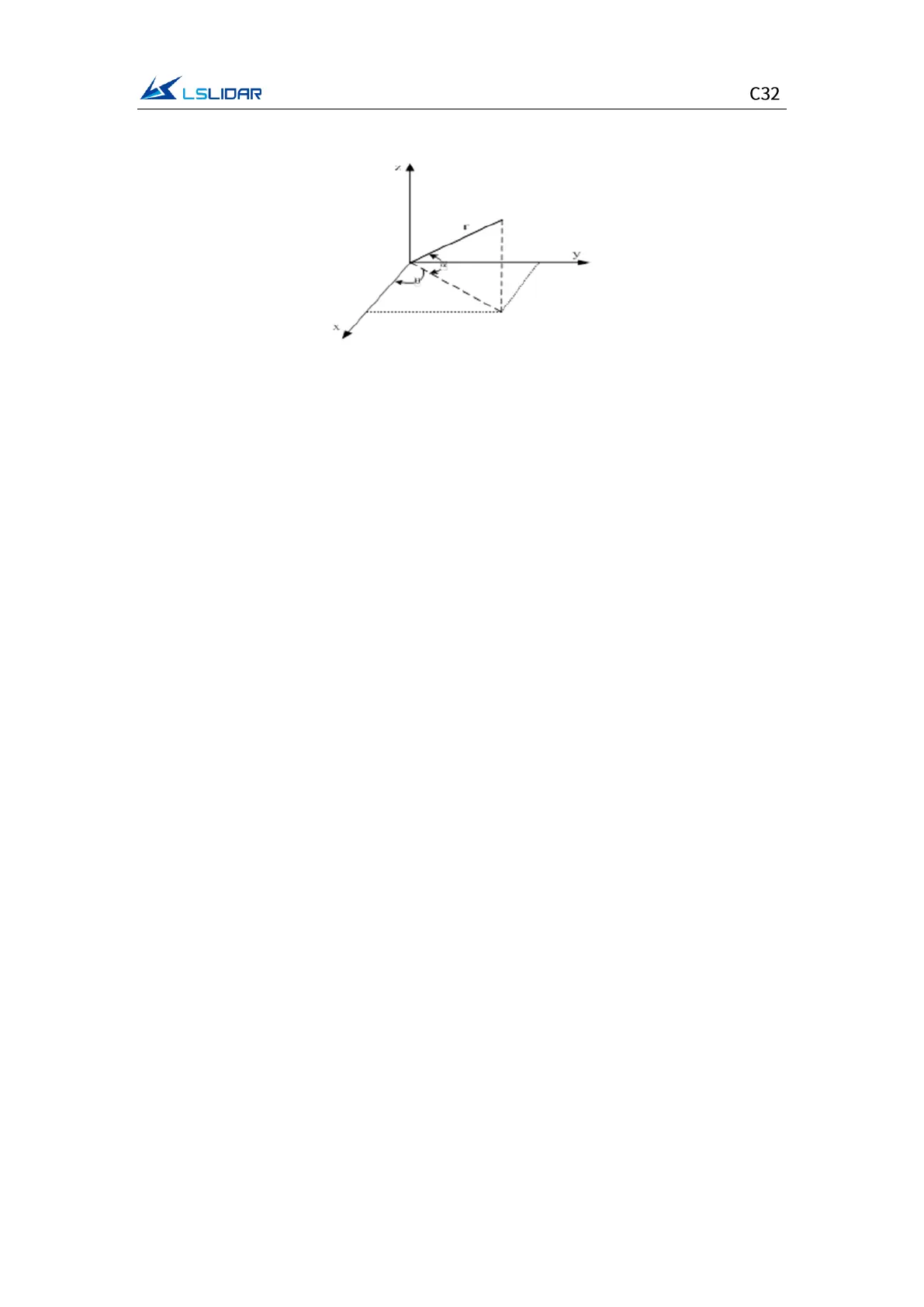
Figure 7.4 Coordinate Mapping (2)
7.4 Judgment of One Frame of Data
Assuming that the starting position of a frame is near 0 degrees, two adjacent
angle values (Azimuth N and Azimuth (N+1)) can be used as judgment conditions.
If the absolute value of (Azimuth (N+1) - Azimuth N) is greater than 180 degrees,
it is determined that the data of the Azimuth N block has reached the end of one
frame (some points of this block, up to 31, may be the data of the next frame).
The data of the Azimuth (N+1) block is collected as the data of the next frame.
8. Accurate Time Calculation
To accurately calculate the time of the point cloud data, it is necessary to obtain
the timestamp of the data packet and the UTC of the device package output by
the lidar. The timestamp and UTC time come from the same synchronization
source, such as a GPS or PTP server.
The light-emitting time interval of each channel of C32 lidar is 1562.5 ns. The
data packet has 12 data blocks, and one data block contains 32-channel data.
The measurement time interval of the data block is 1562.5 ns *32=50,000 ns.
A data packet has a total of 32*12=384 channel data, and the packet packing
time is about 50,000 ns*12 =0.6 ms, and the data rate is 1s/0.6 ms=1666.7 data
packets/sec. The data rate of dual echo mode doubles.
8.1 Calculation of Data Packet End Time
The timestamp in the data packet is a relative time in nanosecond, which is
defined as the packing time of the laser measurement data of the last channel in
the data packet (packet end time), and its duration is less than 1 second.
Therefore, to calculate the absolute end time of the data packet, it is necessary