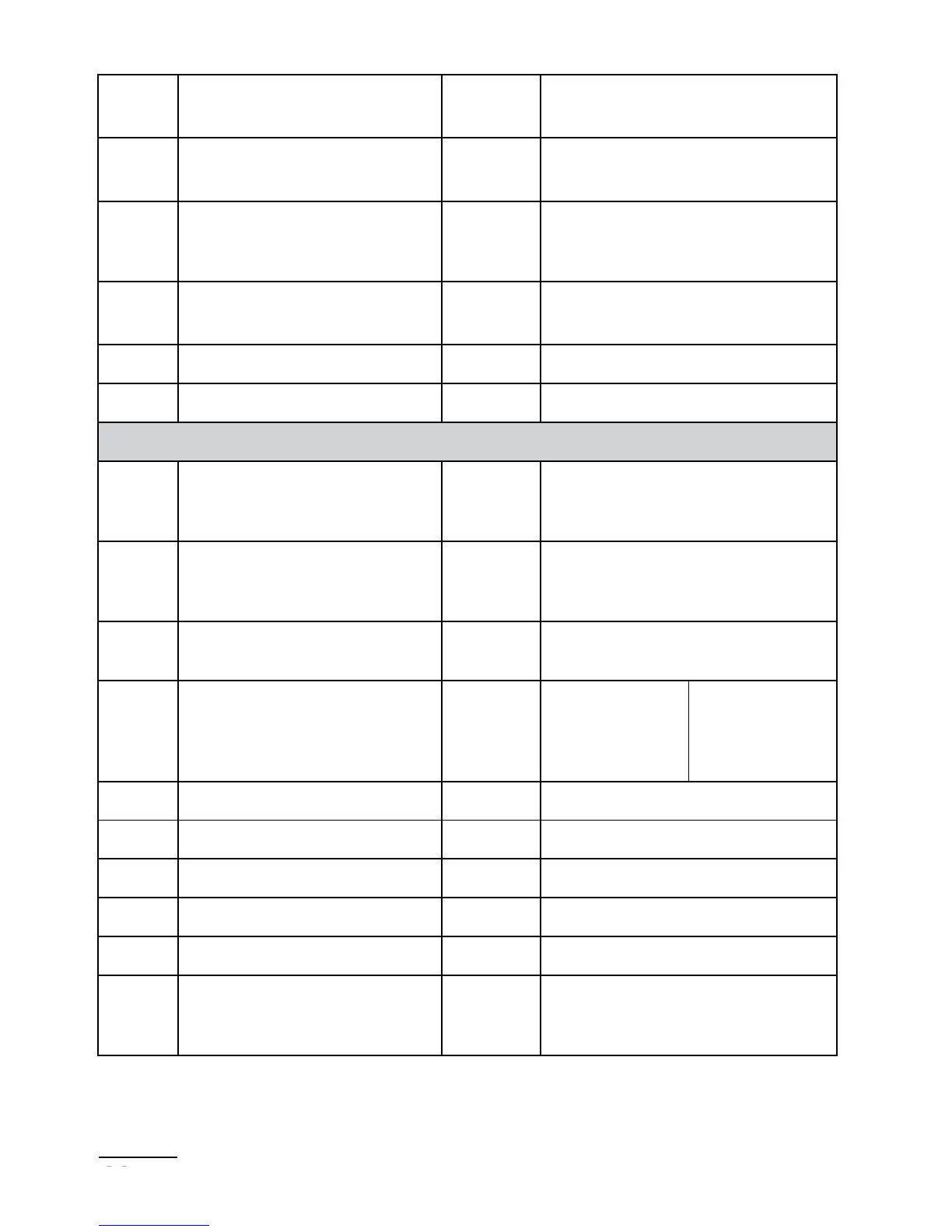
Yfl
Value of the control signal
in case when fa1l = Yfl
0.0 0.0....100.0
YmH
Upper mean vaule limit
5.0 %
0.0...100.0
Lym
Maximum system de-
viation when calculating
mean value
8.0
0.0...999.9
to1
Pulse period of output 1 20.0 s 0.5...99.9 s
to2
Pulse period of output 2 20.0 s 0.5...99.9 s
to3
Pulse period of output 3 20.0 s 0.5...99.9 s
ctrl – Control parameters
alg
Control algorithm
pid
oNof: control algorithm
on-off
pid: control algorithm PID
type
Kind of control
inu
dir: direct control (cooling)
inu: reverse control
(heating)
Hy
Hysteresis 1.1
o
C
0.2...100.0
o
C
(0.2...180.0
o
F)
Hn
Displacement zone for
heating-cooling control
or dead zone for stepper
control
0.4
o
C
0.0...100.0
o
C
(0.0...180.0
o
F)
0...999
1)
tMuo
Valve open time 60.0 s 3.0...600.0 s
tMuc
Valve close time 60.0 s 3.0...600.0 s
mNTu
Minimum valve work time 0.2 s 0.1...99.9 s
y-lo
Minimum control signal 0.0 % 0.0..100.0 %
y-Hi
Maximum control signal 100.0 % 0.0...100.0 %
Gty
“Gain Scheduling “
function
off
off: disabled
sp: from set point value
set: constant PID set

 Loading...
Loading...
