14 MAGNETEK HPV1000 AC Elevator Drive Technical Manual
5 Programming
5 Programming
Adjust Menu Parameters
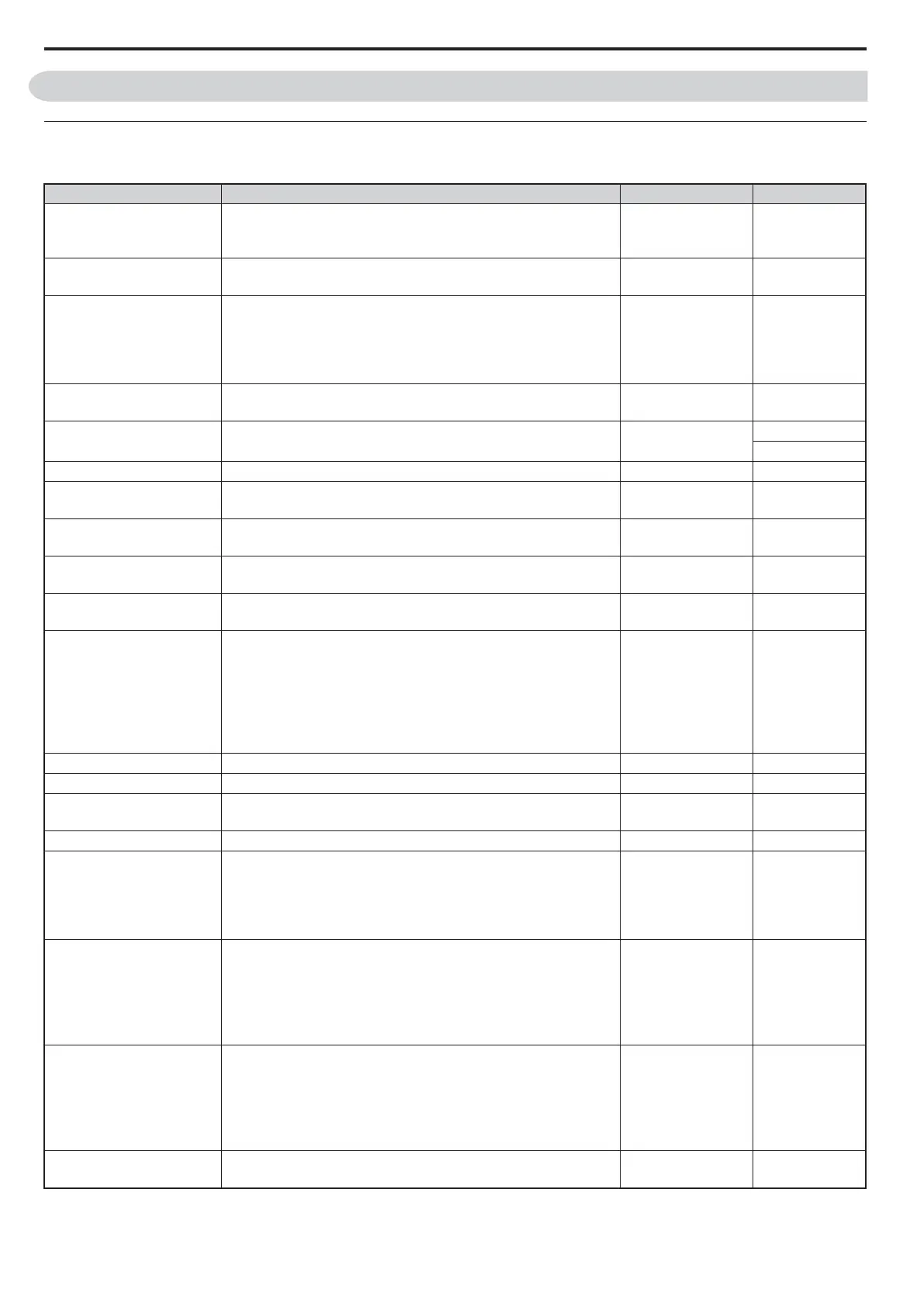
Table 1 Drive A1 Submenu
A1 Parameter Name Description
Units Default
Contract Car Spd
Sets the elevator contract car speed. The value entered here will be the
number that is displayed on the drive when commanded to run at high
speed.
m/s 2.0
Contract Mtr Speed
Motor speed (in rpm) that will allow the elevator to travel at Elevator
Contract Car Speed.
RPM 1130.0
Response
<3>, <4>
Sets the sensitivity of the drive's speed regulator in terms of the speed
regulator bandwidth in radians. The responsiveness of the drive as it
follows the speed reference will increase as this number increases. If
the number is too large, the motor current and speed will become
jittery. If this number is too small, the motor will become sluggish.
Rad/sec
<3>, <4> 10.0 <3>, <4>
Inertia <3>, <4>
Sets the equivalent of the system inertia in terms of the time it takes
the elevator to accelerate to motor base speed at rated torque.
Sec
<3>, <4> 2.00 <3>, <4>
Encoder Pulses
This parameter sets the pulses per revolution the drive receives from
the encoder.
PPR
1024
<1>, <2>, <3>
2048 <4>
Mtr Torque Limit <2>, <3>, <4> Sets the maximum torque allowed during the motoring mode. % <2>, <3>, <4> 200.0 <2>, <3>, <4>
Regen Torq Limit <2>, <3>, <4>
Sets the maximum regenerative torque allowed during the
regeneration mode.
%
<2>, <3>, <4> 200.0 <2>, <3>, <4>
Trq Lim Msg Dly <1>, <2>, <4>
This parameter determines the amount of time the drive is in torque
limit before the Torque Limit alarm is declared.
Sec
<1>, <2>, <4> 01.0 <1>, <2>, <4>
Gain Change Level <3>, <4>
Sets the speed level at which the Response (A1) gain will begin to be
reduced for low gain mode.
%
<3>, <4> 100.0 <3>, <4>
Gain Reduce Mult <3>, <4>
This parameter is the percentage that the Response (A1) value will
change to when in low gain mode.
%
<3>, <4> 100 <3>, <4>
Contact Flt Time
When external logic outputs are used to control the closing of the
motor contactor, this parameter sets the amount of time delay at start
until the drive output is enabled and current flows.
And when external logic inputs are used to confirm the closing of the
motor contactor, this parameter sets time the drive should expect the
motor contactor confirmation signal to be made before a Contactor
Fault is declared.
Sec 00.10
Notch Frequency
<3>, <4> Sets the center frequency of the notch filter. Hz <3>, <4> 20 <3>, <4>
Notch Depth <3>, <4> Sets the attenuation level of the notch filter. % <3>, <4> 0 <3>, <4>
Tach Rate Gain <3>, <4>
Setting of this parameter helps with reducing the effects of rope
resonance.
-0.0
<3>, <4>
Inner Loop Xover <3>, <4> This parameter sets the frequency of the inner loop speed regulator - 10.0 <3>, <4>
Auto Restarts
Sets the number of times the drive may attempt to reset after the
following faults occur: Ground Fault, Phase Loss, Overcurrent,
Overvoltage, Braking Transistor Fault, Heatsink Error, Motor
Overload, Drive Overload, Overtorque Detection 1, Overtorque
Detection 2, Undertorque Detection 1, Undertorque Detection 2.
-0
Brake Pick Delay
<1>, <2>
In Open Loop modes when external logic outputs are used to control
the mechanical brake, this is the time delay from a drive run command
until the brake is picked. This time delay needs to be set for the
following: have DC injection current before the mechanical brake is
picked and have DC injection current after the mechanical brake is
picked to allow the brake to fully open.
Sec
<1>, <2> 0.20 <1>, <2>
Brake Drop Delay <1>, <2>
In Open Loop modes when external logic outputs are used to control
the mechanical brake and ramp to stop is selected, this parameter sets
the time delay to set the brake after decelerating to the DC Stop Freq.
This time delay needs to be set for the following: have DC injection
current before the mechanical brake is closed and after the mechanical
brake is picked to allow the brake to fully open.
Sec
<1>, <2> 0.10 <1>, <2>
Brake Pick Time
Determines the amount of time the drive allows for the brake to lift
and close.
Sec 0.10