5. Commissioning
MiR Fleet PC Getting Started (en) 01/2021 - v.1.5 ©Copyright 2019-2021: Mobile Industrial Robots A/S. 27
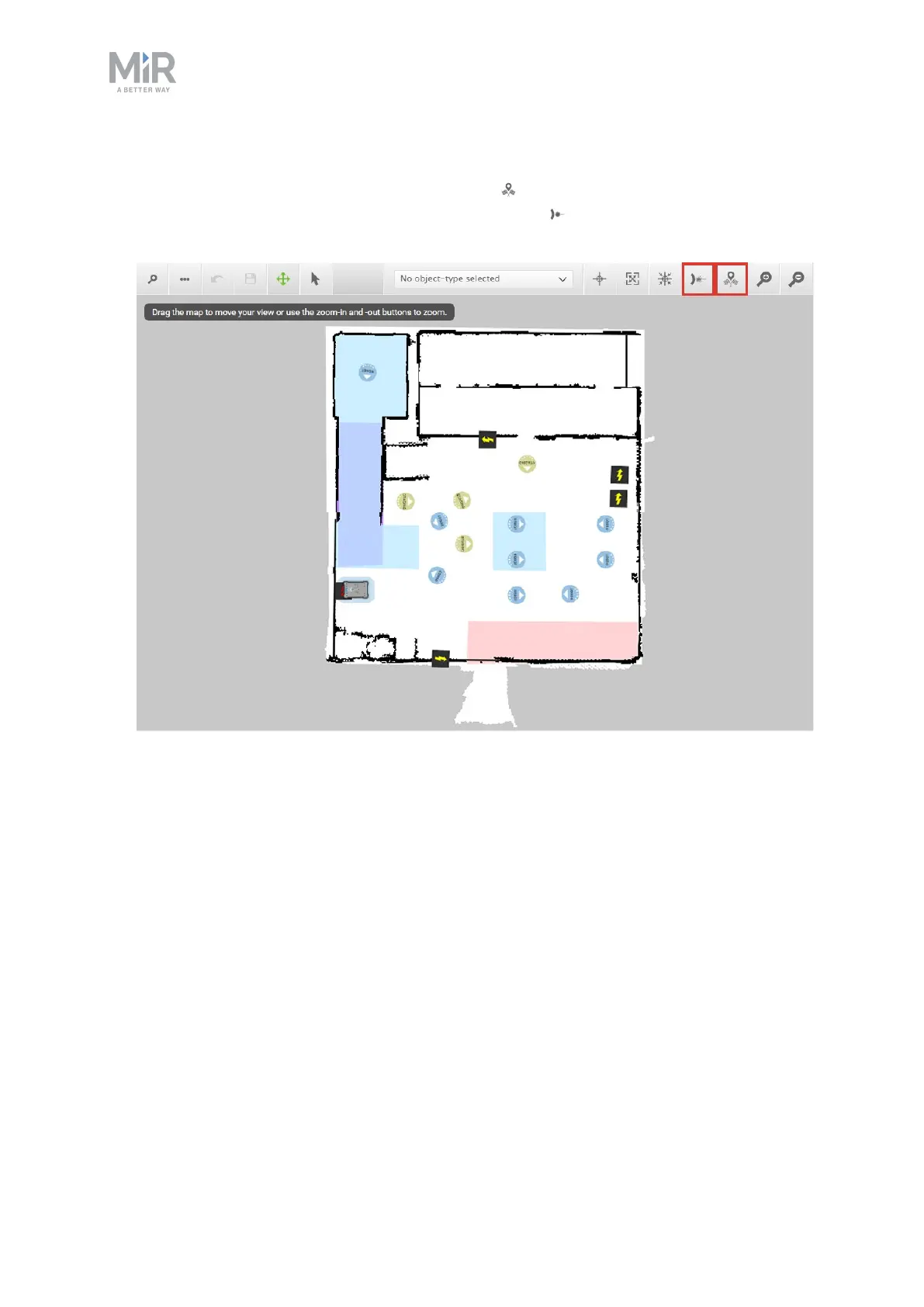
8. If the robot is not correctly positioned on the map, open the map editor and position the
robot correctly using Set robot's start-position to approximately place the robot
correctly on the map and using Adjust robot position to adjust the position until the
red lines align with the black wall lines.
9. When the robot is correctly positioned on an active fleet map, sign out of the robot
interface. We discourage further use of the robot interface.