5. Commissioning
MiR Fleet PC Getting Started (en) 01/2021 - v.1.5 ©Copyright 2019-2021: Mobile Industrial Robots A/S. 48
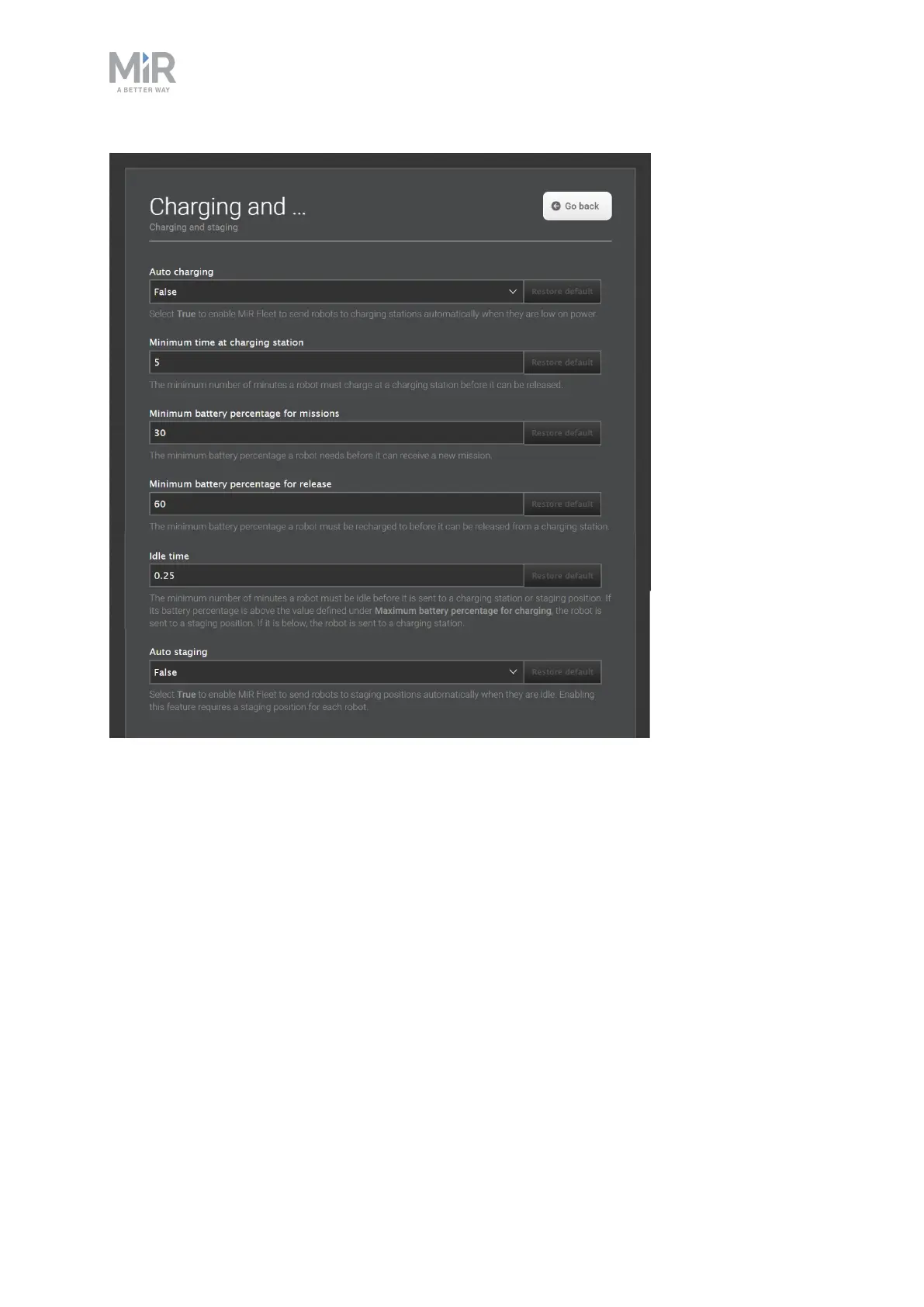
Figure 5.2. Parameters that can be set in Charging and staging.
5.11 Enabling Collision avoidance
Collision avoidance synchronizes the footprints and positions of the robots connected to the
fleet. With Collision avoidance enabled, MiRFleet uses the robots' footprints and positions to
help prevent collisions between robots and guide robots to go around each other more
smoothly.
The fleet continuously communicates all robots' positions to the robots in the fleet. The
robots then match that information with the information from their laser scanners. If the
information from the fleet and the scanners matches, the robot concludes that there is
another robot. MiR Fleet provides the footprint of that robot, which is then added to the
purple obstacle cloud, ensuring that the robots' footprints do not collide.