5. Spindle Adjustment
5 - 19
5-3-3 Adjusting the orientation control
(1) Confirming the default parameters
Set the default parameters for each detector used in orientation control.
1) Motor PLG
Motor PLG orientation is possible only when the spindle and motor are coupled, or when they
are coupled 1:1 with gears (timing belt). The SP025 (GRA1) to SP032 (GRB4) parameters can
be set only to 1. The PLG with Z-phase must be mounted on the motor to be used.
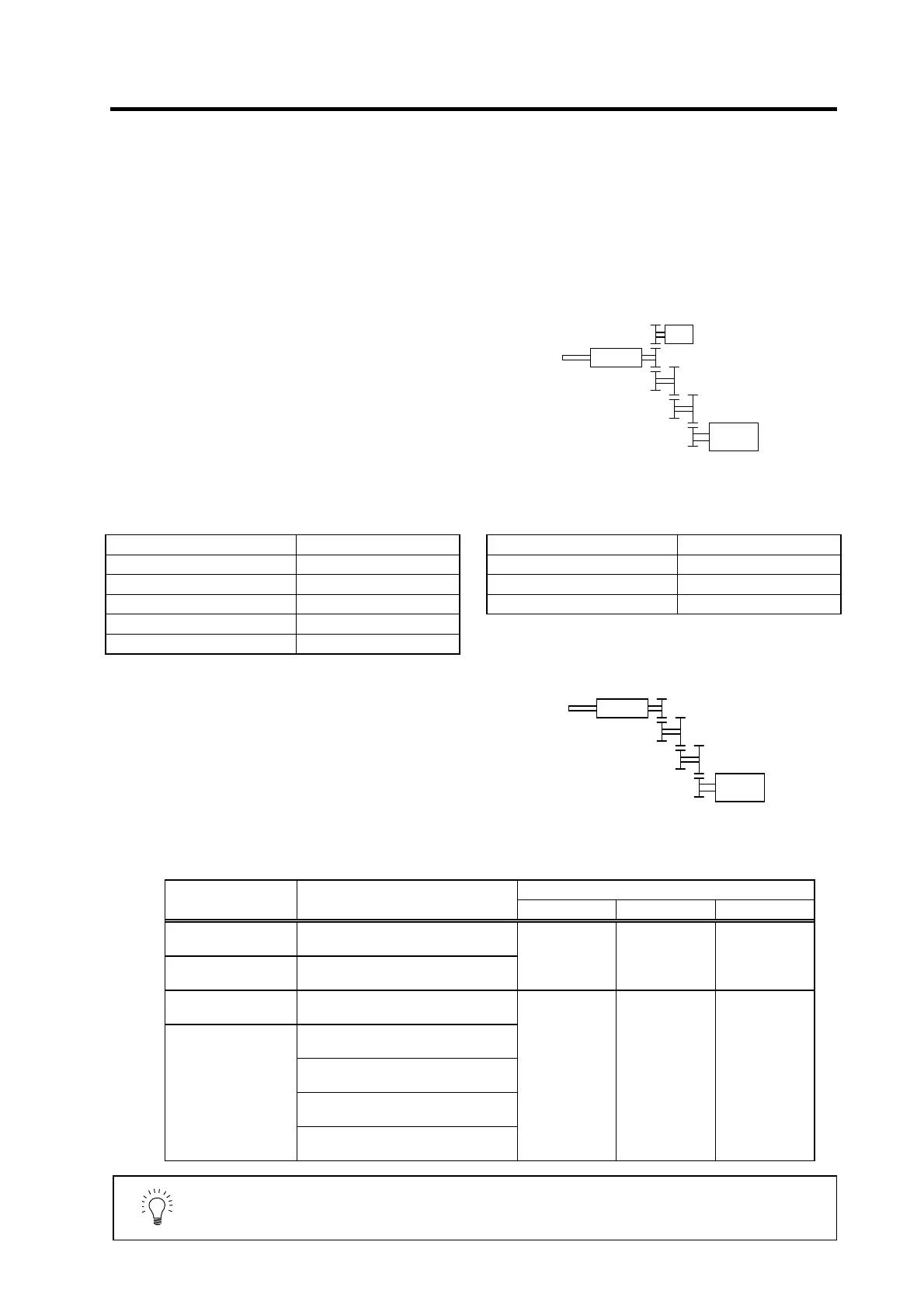
2) Spindle encoder
An accurate gear ratio (or pulley ratio) is required
from the motor shaft to the encoder rotary axis. Make
sure that the correct number of gear teeth is set in
SP025 (GRA1) to SP032 (GRB4).
SP025 to SP028=A × C × E
SP029 to SP032=B × D × F
Refer to the following table and set the gear ratio
(A:X) between the spindle and spindle encoder in
SP096 (EGAR).
Gear ratio (deceleration) SP096 setting value Gear ratio (acceleration) SP069 setting value
1 : 1 0 1 : 2 -1
1 : 1/2 1 1 : 4 -2
1 : 1/4 2 1 : 3 -3
1 : 1/8 3
1: 1/16 4
3) Magnetic sensor
An accurate gear ratio (or pulley ratio) is required from
the motor shaft to the encoder rotary axis. Make sure
that the correct number of gear teeth is set in SP025
(GRA1) to SP032 (GRB1).
SP025 to SP028=A × C × E
SP029 to SP032=B × D × F
The SP123 (MGD0) to SP125 (MGD2) parameters
are set as shown below according to the magnetic
sensor type.
Parameter setting
Type Magnetic sensor type
SP123 (MGD0) SP124 (MGD1) SP125 (MGD2)
Standard MAGNETIC SENSOR
BKO-C1810H01-3
High-speed standard MAGNETIC SENSOR
BKO-C1730H01.2.6
542 768 384
High-speed compact MAGNETIC SENSOR
BKO-C1730H01.2.9
MAGNETIC SENSOR
BKO-C1730H01.2.41
MAGNETIC SENSOR
BKO-C1730H01.2.42
MAGNETIC SENSOR
BKO-C1730H01.2.43
High-speed ring type
MAGNETIC SENSOR
BKO-C1730H01.2.44
500 440 220
POINT
When using the magnetic sensor, orientation control cannot be carried out with
a machine having a gear ratio between the spindle motor and spindle exceeding
1:31.
S
indle encode
XS
indle
Spindle
moto
A
BC
D E
F
Spindle configuration when using
spindle encoder
S
indle
Spindle
moto
A
B C
D E
F
Spindle configuration when using
magnetic sensor

 Loading...
Loading...






