Safety information Product information Mechanical installation Electrical installation Multi axis system design Technical data
Digitax HD M75X Series Installation and Technical Guide 75
Issue Number: 5
4.12 Position feedback connections
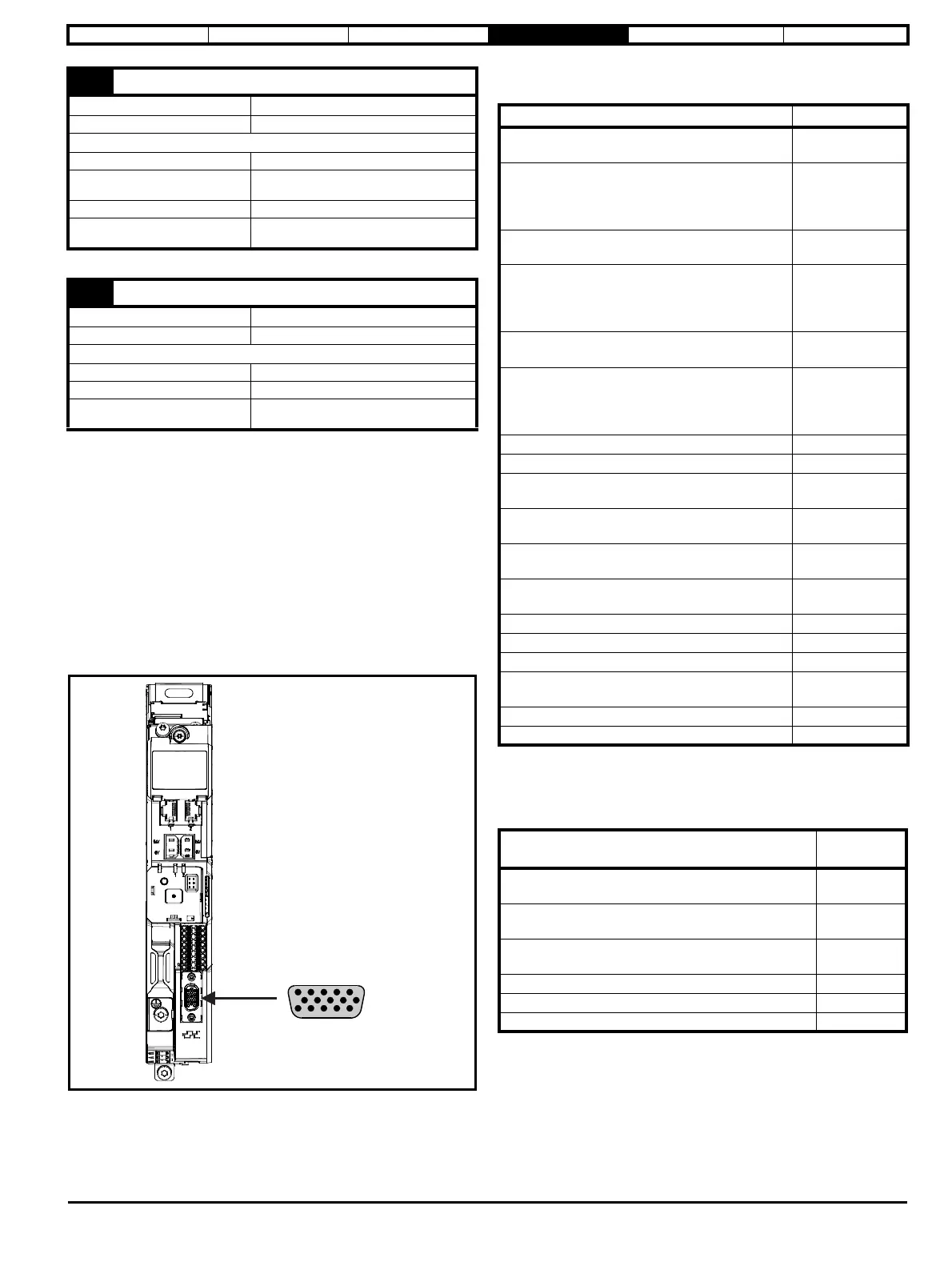
The following functions are provided via the 15-way high density D-type
connector on the drive:
• Two position feedback interfaces (P1 and P2).
• One encoder simulation output.
• Two freeze trigger inputs (marker inputs).
• One thermistor input.
The P1 position interface is always available but the availability of the P2
position interface and the encoder simulation output depends on the
position feedback device used on the P1 position interface, as shown in
Table 4-18.
4.12.1 Location of position feedback connector
Figure 4-28 Location of position feedback connector
4.12.2 Compatible position feedback devices
Table 4-16 Supported feedback devices on the P1 position interface
* This feedback device provides very low resolution feedback and should
not be used for applications requiring a high level of performance
Table 4-17 Supported feedback devices on the P2 position
interface
Table 4-18 shows the possible combinations of position feedback device
types connected to the P1 and P2 position interfaces and the availability
of the encoder simulation output.
14 Digital Output 1
Terminal 14 default function AT ZERO SPEED output
Type Positive logic voltage source outputs
Operating as an output
Nominal maximum output current 100 mA
Maximum output current
200 mA (combined with +24 V user output/
DO3)
Voltage range 0V to +24 V
Sample / Update period
2 ms (output will only change at the
update rate of the source parameter
16 Digital Output 2
Terminal 16 default function High current motor brake output
Type Positive logic voltage source outputs
Operating as an output
Nominal output current 1 A (1.3 A max)
Voltage range 0V to +24 V
Sample / Update period
2 ms (output will only change at the
update rate of the source parameter
5
10
15
1
6
11
Drive encoder connector
Female 15-way D-type
Encoder type Pr 03.038 setting
Quadrature incremental encoders with or without
marker pulse
AB (0)
Quadrature incremental encoders with UVW
commutation signals for absolute position for
permanent magnet motors with or without marker
pulse
AB Servo (3)
Forward / reverse incremental encoders with or
without marker pulse
FR (2)
Forward / reverse incremental encoders with UVW
commutation signals for absolute position for
permanent magnet motors with or without marker
pulse
FR Servo (5)
Frequency and direction incremental encoders
with or without marker pulse
FD (1)
Frequency and direction incremental encoders
with UVW commutation signals for absolute
position for permanent magnet motors with or
without marker pulse
FD Servo (4)
Sincos incremental encoders SC (6)
Sincos incremental with commutation signals SC Servo (12)
Heidenhain sincos encoders with EnDat comms
for absolute position
SC EnDat (9)
Stegmann sincos encoders with Hiperface comms
for absolute position
SC Hiperface (7)
Sincos encoders with SSI comms for absolute
position
SC SSI (11)
Sincos incremental with absolute position from
single sin and cosine signals
SC SC (15)
SSI encoders (Gray code or binary) SSI (10)
EnDat communication only encoders EnDat (8)
Resolver Resolver (14)
UVW commutation only encoders* Commutation only
(16)
BiSS communication only encoders BiSS (13)
Sincos encoders with BiSS communications SC BiSS (17)
Encoder type
Pr 03.138
setting
Quadrature incremental encoders with or without
marker pulse
AB (1)
Frequency and direction incremental encoders with or
without marker pulse
FD (2)
Forward / reverse incremental encoders with or
without marker pulse
FR (3)
EnDat communication only encoders EnDat (4)
SSI encoders (Gray code or binary) SSI (5)
BiSS communication only encoders BiSS (6)