MX2 Quick Start Guide 43
PARAMETER LIST
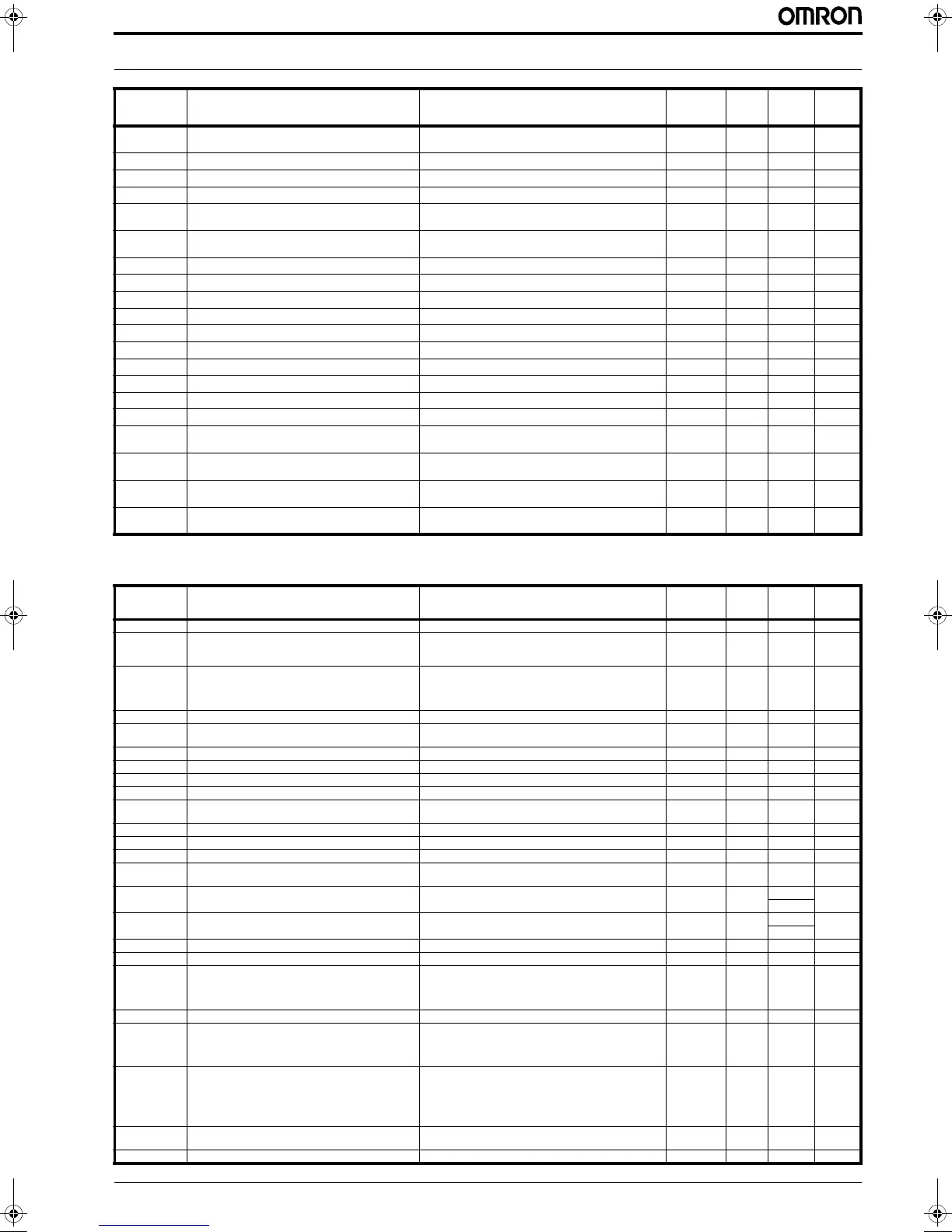
4.6 Parameter group P
H105 PM motor rated current Set a level between 20% and 100% for the rated inverter
current
0.01 [A] 1574h -
H106 PM motor constant R 0.001 to 65.535 0.001 [] 1575h -
H107 PM motor constant Ld 0.01 to 655.35 mH 0.01 mH 1576h -
H108 PM motor constant Lq 0.01 to 655.35 mH 0.01 mH 1577h -
H109 PM motor constant Ke 0.0001 to 6.5535 Vpeak/(rad/s) 0.0001
V/(rad/s)
1578h -
H010(32-bits) PM constant J 0.001 - 9999.000 kg/m² 0.001 kg/
m²
1579h -
H111 Auto constant R 0.001 to 65.535 0.001 [] 157Bh -
H112 Auto constant Ld 0.01 to 655.35 mH 0.01 mH 157Ch -
H113 Auto constant Lq 0.01 to 655.35 mH 0.01 mH 157Dh -
H116 PM Speed Response 1 to 1000 – 1581h 100
H117 PM Starting Current 20.00 to 100.00% – 1582h 70.00
H118 PM Starting Time 0.01 to 60.00 s 0.01 [s] 1583h 1.00
H119 PM Stabilization Constant 0 to 120% – 1584h 100
H121 PM Minimum Frequency 0.0 to 25.5% – 1586h 8.0
H122 PM No-Load Current 0.00 to 100.00% – 1587h 10.00
H123 PM Starting Method Select 00 (Normal ), 01 (IMPE) – 1588h 00
H131 PM Initial Magnet Position
Estimation 0 V Wait Times
0 to 255 – 158Ah 10
H132 PM Initial Magnet Position
Estimation Detect Wait Times
0 to 255 – 158Bh 10
H133 PM Initial Magnet Position
Estimation Detect Times
0 to 255 – 158Ch 30
H134 PM Initial Magnet Position
Estimation Voltage Gain
0 to 255 – 158Dh 100
Function code Function name Monitoring and setting items Units Run
mode
edit
Modbus
Register
No
Default
P001 Operation mode on expansion card 1 error 00 (tripping), 01 (continuing operation) – 1601h 00
P003 [EA] terminal selection 00 (Speed reference, incl. PID)
01 (Encoder feedback)
02 (Extended terminal for EzSQ)
1603h 00
P004 Pulse train input mode for feedback 00 (Single-phase pulse [EA])
01 (2-phase pulse [90° difference] 1 ([EA] and [EB]))
02 (2-phase pulse [90° difference] 2 ([EA] and [EB]))
03 (Single-phase pulse [EA] and direction signal [EB])
1604h 00
P011 Encoder pulse-per-revolution (PPR) setting 32 to 1024 1 160Bh 512
P012 Simple positioning selection 00 (simple positioning deactivated)
02 (simple positioning activated)
– 160Ch 00
P015 Creep speed "start frequency" to 1000 0.01 [Hz] 160Fh 5.00
P026 Over-speed error detection level 0 to 1500 0.1 [%] 161Ah 115.0
P027 Speed deviation error detection level 0 to 12000 0.01 [Hz] 161Bh 10.00
P031 Accel/decel time input selection 00(digital operator), 03 (easy sequence) – 161Fh 00
P033 Torque command input selection 00 (O terminal), 01 (OI terminal),
03 (digital operator), 06 (Option)
– 1621h 00
P034 Torque command setting 0 to 200 1 [%] 1622h 0
P036 Torque bias mode 00 (disabling the mode),01 (digital operator), – 1624h 00
P037 Torque bias value -200 to +200 1 [%] 1625h 0
P038 Torque bias polarity selection 00 (as indicated by the sign), 01 (depending on the oper-
ation direction), 05(Option)
– 1626h 00
P039 (32-bits) Speed limit for torque-controlled operation (for-
ward rotation)
0 to 12000 0.01 [Hz] 1627h 0.00
1628h
P040 (32-bits) Speed limit for torque-controlled operation (reverse
rotation)
0 to 12000 0.01 [Hz] 1629h 0.00
162Ah
P041 Speed / torque control switching time 0 to 1000 – 162Bh 0
P044 Communication watchdog timer 0 to 9999 0.01 sec. 162Eh 1.00
P045 Inverter action on communication error 00 (tripping), 01 (tripping after decelerating and stop-
ping the motor), 02 (ignoring errors), 03 (stopping the
motor after free-running), 04 (decelerating and stop-
ping the motor)
– 162Fh 00
P046 DeviceNet default connection path 0-7 – 1630h 1
P048 Inverter action on communication idle mode 00 (tripping), 01 (tripping after decelerating and stop-
ping the motor), 02 (ignoring errors), 03 (stopping the
motor after free-running), 04 (decelerating and stop-
ping the motor)
– 1632h 00
P049 Motor poles setting for RPM 0 (0 pole), 1 (2 poles), 2 (4 poles), 3 (6 poles),
4 (8 poles), 5 (10 poles), 6 (12 poles), 7 (14 poles),
8 (16 poles), 9 (18 poles), 10 (20 poles), 11 (22 poles),
12 (24 poles),13 (26 poles),14 (28 poles), 15 (30 poles),
16 (32 poles),17 (34 poles), 18 (36 poles), 19 (38 poles)
– 1633h 0
P055 Pulse train frequency scale 10 to 320 (input frequency corresponding to the allow-
able maximum frequency)
0.1 [kHz] 1639h 1.5
P056 Time constant of pulse train frequency filter 1 to 200 0.01 sec. 163Ah 0.10
Function code Function name Monitoring and setting items Units Run
mode
edit
Modbus
Register
No.
Default
I129E-EN-02+MX2+QuickStartGuide.book Seite 43 Mittwoch, 7. November 2012 1:54 13

 Loading...
Loading...


