High Speed Machining
With OPENcontrol, new Interpolation algorithms have been developed to respond to the
increasing requirement for machining cycles with high speeds and high quality surface
nishing, particularly on 5 axes machines.
The High Speed Machining (HSM) can be activated when one of the available Tool Center
Point kinematics is enabled (TCP programmed). While TCP calculates axes position
considering the trajectory of the tool tip only, HSM add the calculation, of the prole and
relevant acceleration/velocity of the joints (single axis) using the inverted kinematics
calculation to allow to use the maximum dynamic and precision of the axes maintaining
the programmed feed on the workpiece.
The algorithm allows to reach the best machine performances and machining results
avoiding to stress the mechanics.
Virtualization
Virtualization means a set of features for programming virtual axes on a plane to obtain
the motion of the associated physical axes in a three dimensional space.
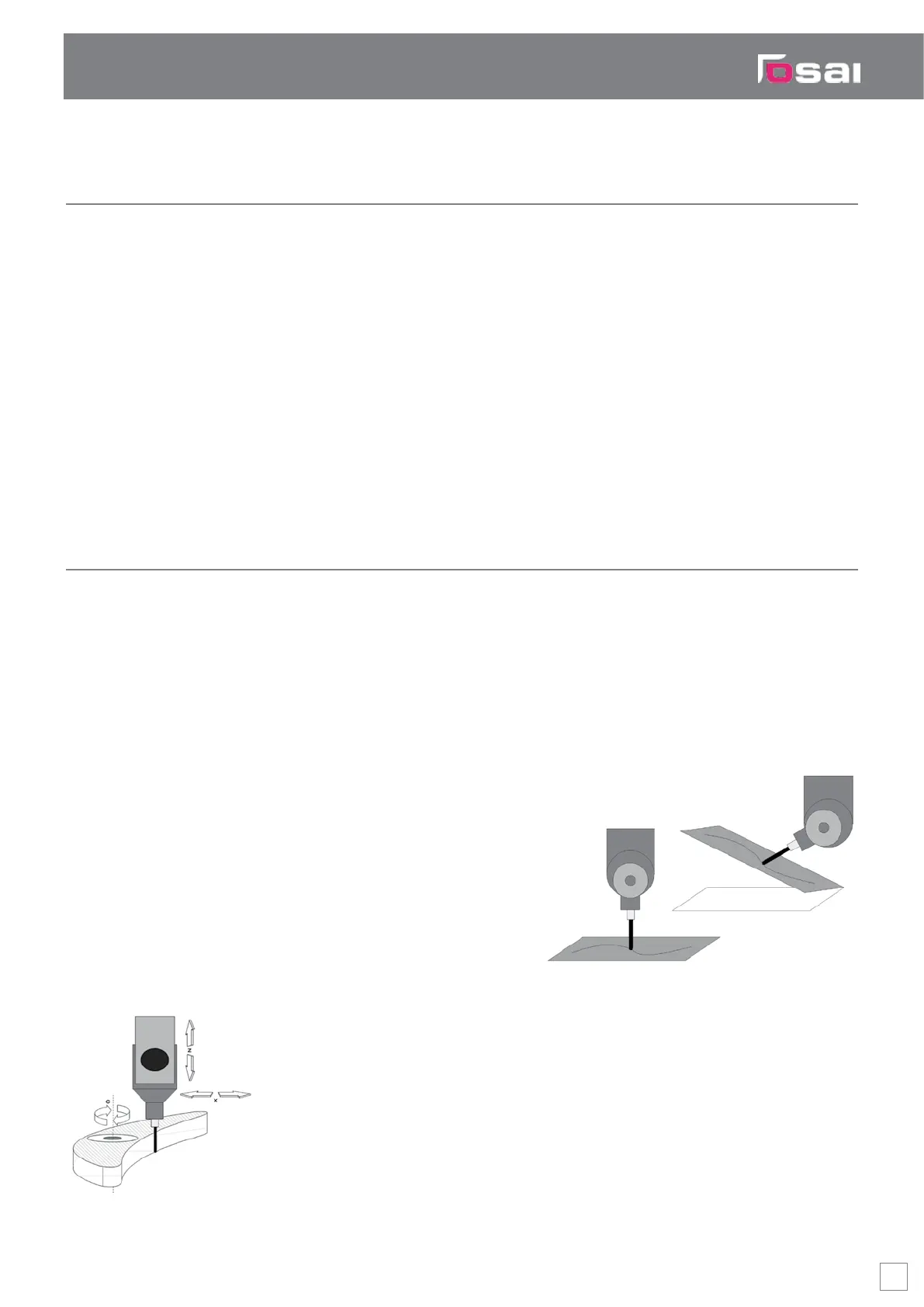
Programming on Rotated Plane
This virtualization allows the programming of any function of the machine (linear or
circular interpolation, canned cycles, probing cycles, cutter radius compensation, TCP,
etc.) in a space rotated towards the 3 Cartesian axes of the machine tool.
It is activated by the program through
an instruction (UPR) where the rotation
angles are specied.
The same axis names used for the original
plane are used to program the virtual
plane. It is also possible to temporarily
switch to the programming of the original
plane using the function G79.
Machining on a 3D oriented plane
Polar Coordinates
Polar coordinates are used when a linear X axis and a rotary C axis must be moved
by programming the axes positions on the UV Cartesian plane. Polar programmed
positions are automatically translated into the physical axes position. This function
is enabled with the UVP (Use Virtual Polar) instruction.
Machining with polar coordinates
OPENcontrol Technical overview
23