D.T.D.P. = Desired Totalizer Decimal Point Enter in Formula
01
0.0 10
0.00 100
0.000 1000
0.0000 10000
I.D.D.P. = Input Display Decimal Point
Enter in Formula
01
0.0 10
0.00 100
0.000 1000
0.0000 10000
S.F.=
250 cu. ft. (Hundreds)
x (
60**
)
*
x
1
S.F.= 1x1x.01 S.F.=.01
250 CFM 60 100
“Pro 5”.....“dECPNt” - 0
“tbASE” - 1
“SCLFAC” - 0.010
“Lo-cut” - 0.00
The totalizer will totalize up to 999999 (999,999 cu. ft.). When switching to
display input, the actual CFM is displayed.
Alternatively, the totalizer can be scaled to indicate in terms of dollars and
cents of consumed gas. If the rate of gas is $4.80/100 cu. ft., then the following
set-ups are made:
S.F.=
4.80
x (
60**
)
*
x
100
S.F.= 4.80x60** x 1
100 60 100
“Pro 5”.....“dECPNt” - 0.00
“tbASE” - 1
“SCLFAC” - 0.048
“Lo-cut” - 0.00
The totalizer will totalize up to 9999.99 dollars in 0.01 dollar resolution.
* This value is normally 1, but can be used as a coarse scale factor of 60 or 3600.
**Since the time period is in minutes, the selected T.B. is 60 (Program Select
Value = 1) which equals per min. (60 sec.)
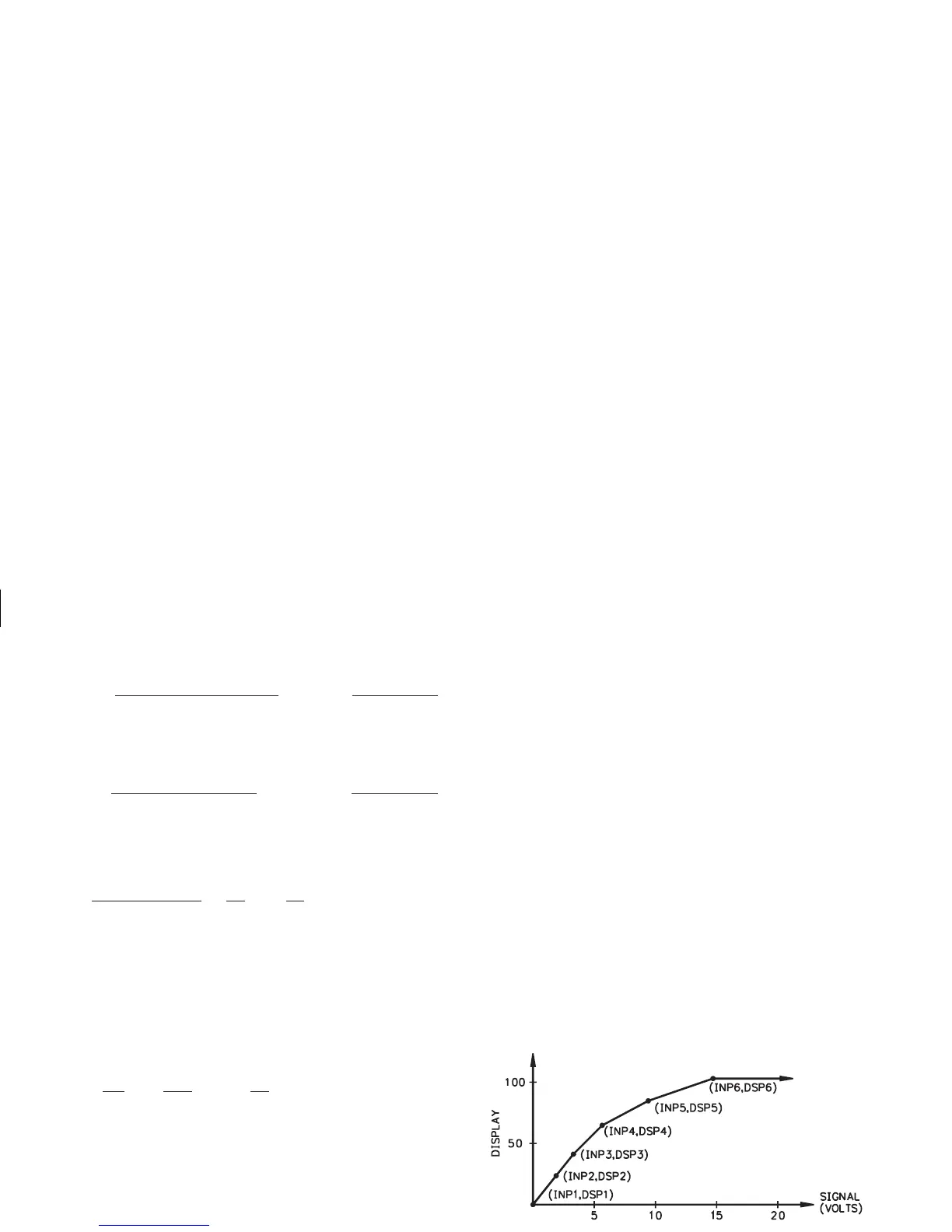
LINEARIZER
The linearizer feature is a series of programmable scaling points that are used
to construct linear segments to linearize the input signal. The most common
application would be to interface with square law devices (commonly, flow
transducers). Correction for non-linearity is accomplished by continuing with
scaling points beyond “DSP 2” and “INP 2” in “Pro 1” and “Pro 2”, with
“DSP 3”, and “INP 3”, “DSP 4”, and “INP 4”, etc. The unit automatically
calculates the linear segments between the programmed coordinates. This
process of entering linear segments is also known as “curve fitting”.A
maximum of nine segments are available and using nine segments for a square
law device would reduce linearity errors to approximately 0.35%. No restriction
is placed on the ordering of the scaling points as long as the input signal scaling
points are all increasing or all decreasing. To have one or more points
“back-track”, the input/output (signal/display) relationship would not be a
function and would be undefined in that area. Additionally, consideration
should be given to the location and length of each segment to fully minimize the
segment conformity error over the desired range. A typical curve is shown
below using five segments (six scaling points). Usually it is desirable to use as
many segments as possible to reduce the amount of linearity error.
-26-