TPS-1 User’s Manual: Hardware 3. Host Interface
R19UH0081ED0107 Rev. 1.07 page 31 of 86
Jul 30, 2018
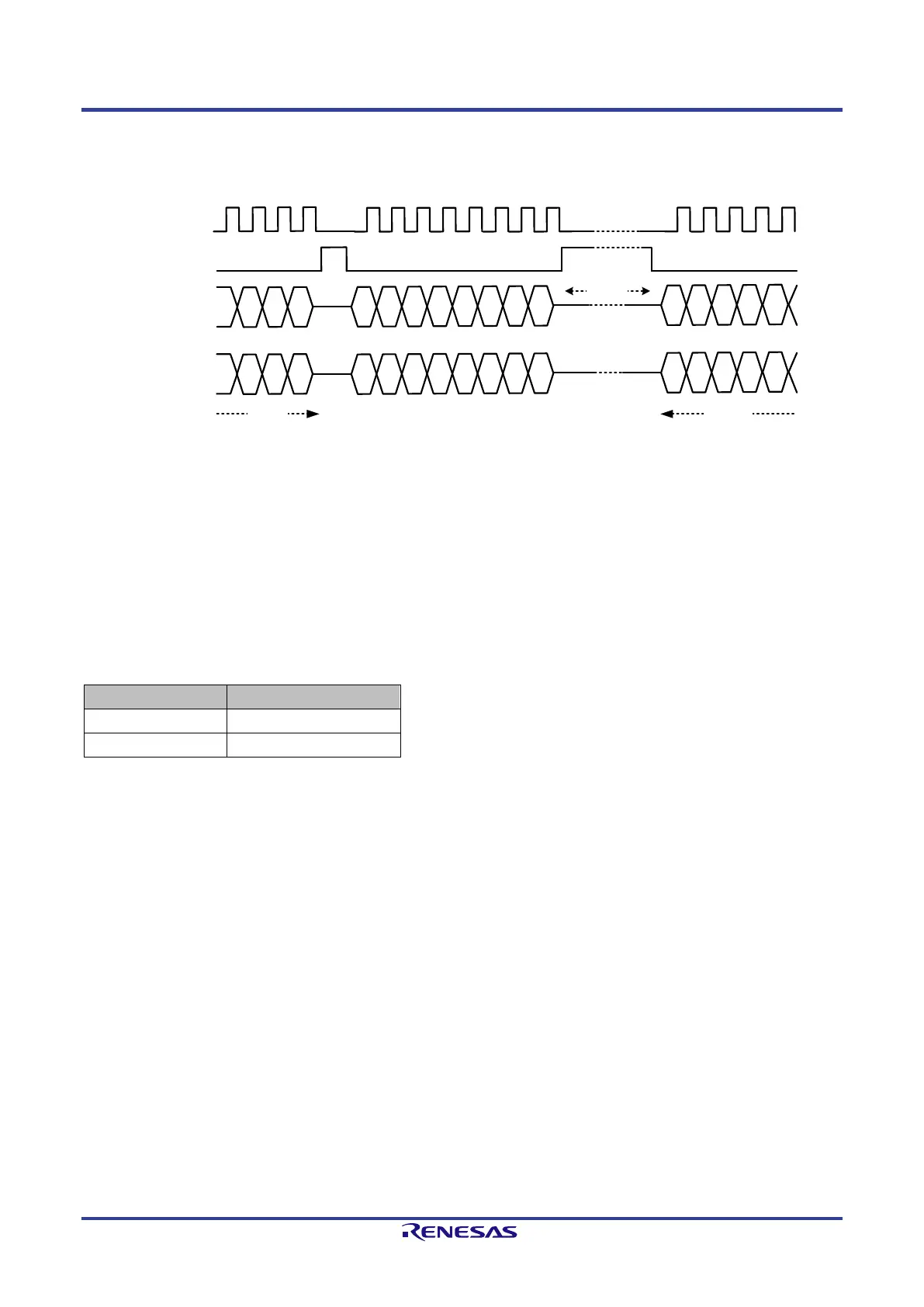
3.3.2.2.2. SPI Slave Interface Handshake Wait Mode
When using the Handshake Wait Mode, the SPI master deactivates the data transfer after the header has been transmitted and starts a wait time. During
this time, the SPI Slave can provide the requested data.
B23
B22
B21
B20
B19
B17
B18
B16
HOST_SCLK_IN
HOST_SFRN_IN
HOST_SRXD_IN
B9
B10
B8
B9
B10
B8
Dummy
Dummy
Dummy
Dummy
Dummy
Dummy
Dummy
Dummy
B7
B6
B5
B4
B3
Dummy
Dummy
Dummy
Dummy
Dummy
HOST_STXD_OUT
SPI
-
Status SPI
-
RD-
Data
Motorola SPI
format:
SPO = 0
SPH
= 0
Wait_Time
Figure 3-14: SPI Read-Timing Wait Mode
The following equation describes the Wait-Time after the command bytes, before starting the payload data:
T
Wait
= ((32 * f
sys
/f
SPI
) - 10); (T
Wait
* 1/f
sys
= Wait-Time)
The following table shows a rough estimation for two frequencies:
Table 3-10: SPI Wait Time
SPI Clock (MHz) Wait-Time (µs)
25 1.18 – 1.2
 Loading...
Loading...