Robotiq Hand-E C10 Gripper Instruction Manual
INFO
For TCPand center of mass of the Hand-E C10 Gripper used in combination with other Robotiq products,
refer to the specific table provided on our support website.
The moment of inertia are calculated for a configuration where the fingers are fully open and includes the following component:
l
Hardware and fasteners
l
Gripper coupling
l
Stepped fingers extender
l
Stop plate including short and long spacers.
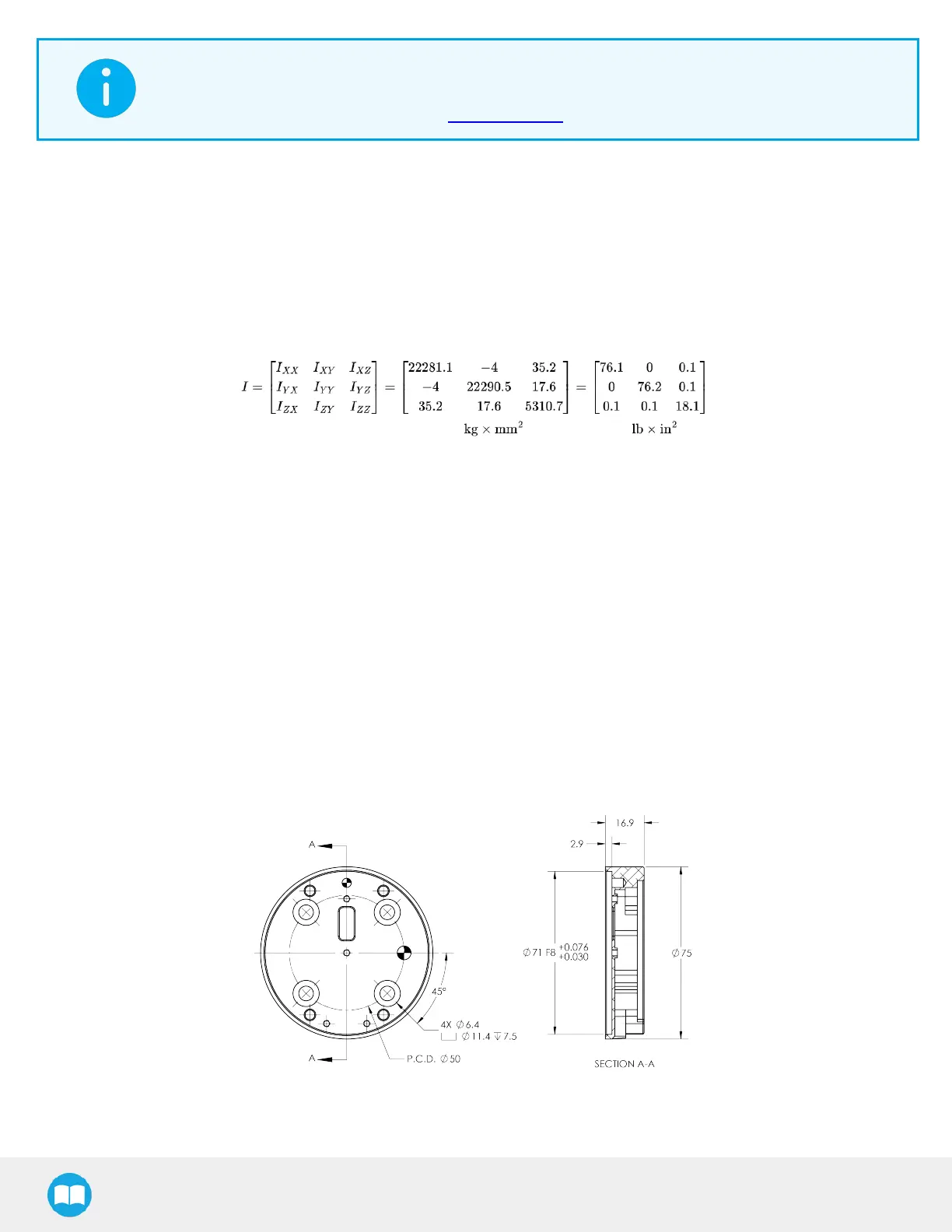
Here is the approximate moment of inertia matrix for the gripper:
Fig. 5-2: Inertia Matrix for Hand-E C10
5.1.3. Couplings
The Hand-E C10 Gripper requires a coupling provided by Robotiq to operate. The coupling is mandatory since it integrates
electronics and electrical contacts.
Coupling for ISO 9409-1-50-4-M6
Bolt pattern for coupling GRP-CPL-062 and GRP-ES-CPL-062 (please refer to the Spare Parts, Kits and Accessories section) is
compatible with:
l
50 mm pitch circle diameter:
l
(4) M6-1.0 low head socket cap screw clearance
l
(1) M6 dowel pin
l
ISO 9409-1 standard 50-4-M6
Fig. 5-3: Coupling for ISO 9409-1-50-4-M6.
102