Robotiq Hand-E C10 Gripper Instruction Manual
TIP - Rule of Thumb
If the sum of all forces is higher than 196N, robot acceleration can be reduced. In most applications a
acceleration of 9.8m/sec2 by the robot is more than enough to reach proper cycle time. A proper robot
acceleration would be around 5m/sec2. For higher payload, robot acceleration can be reduce lower than
5m/sec2
WARNING
Robot acceleration must be accounted for in payload calculations.
Robot emergency stops will lead to major decelaration velocities.
INFO
The Gripper has a power off brake. When the force setting is reached, the brake automatically engages for
power consumption efficiency and safety purposes.
Even without power, the gripping force is maintained.
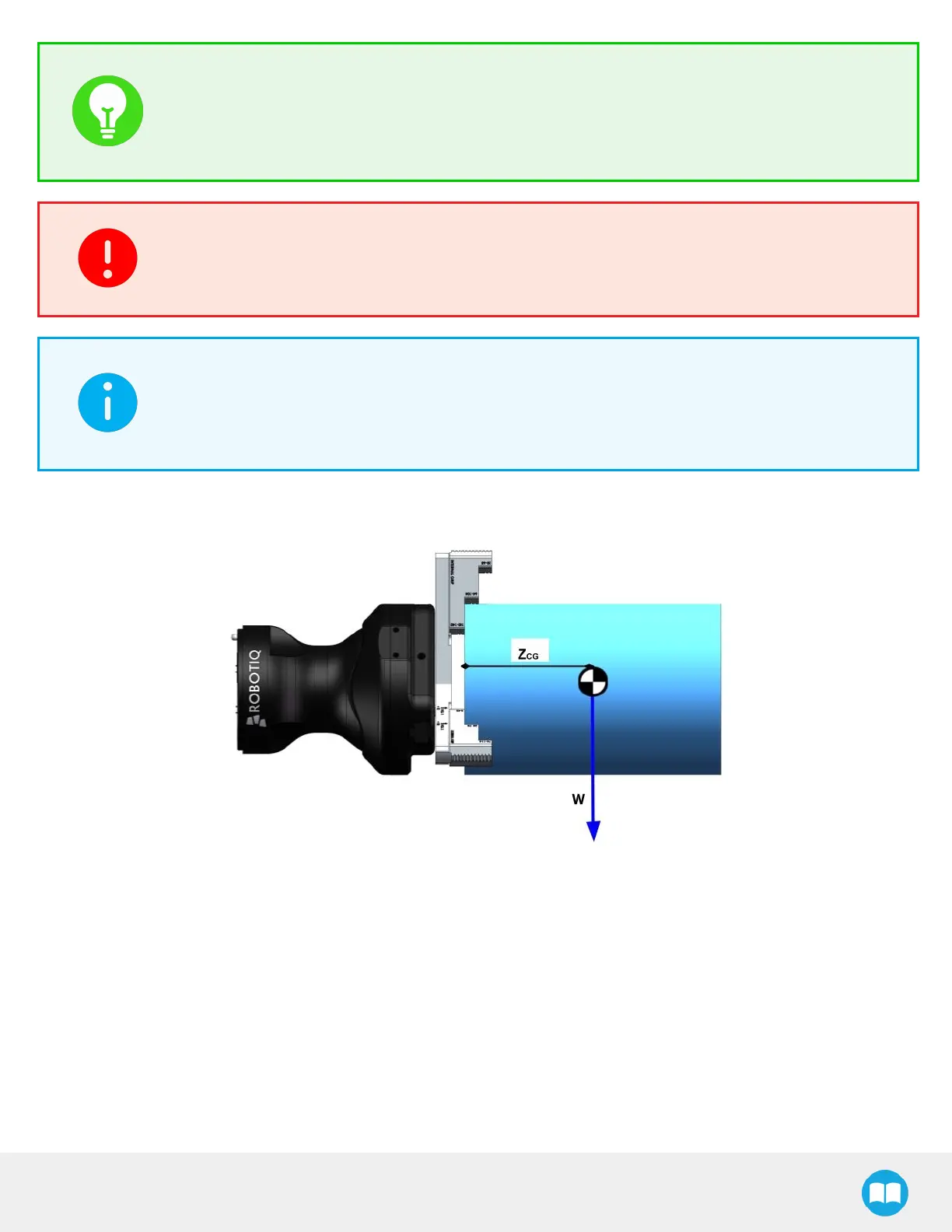
The eccentricity of the load is the distance between the center of gravity of the load and the point at which the load makes contact
with the Gripper fingers. (Zcg in the figure below).
Fig. 5-7: Hand-E C10 Load Eccentricity