Robotiq Hand-E C10 Gripper Instruction Manual
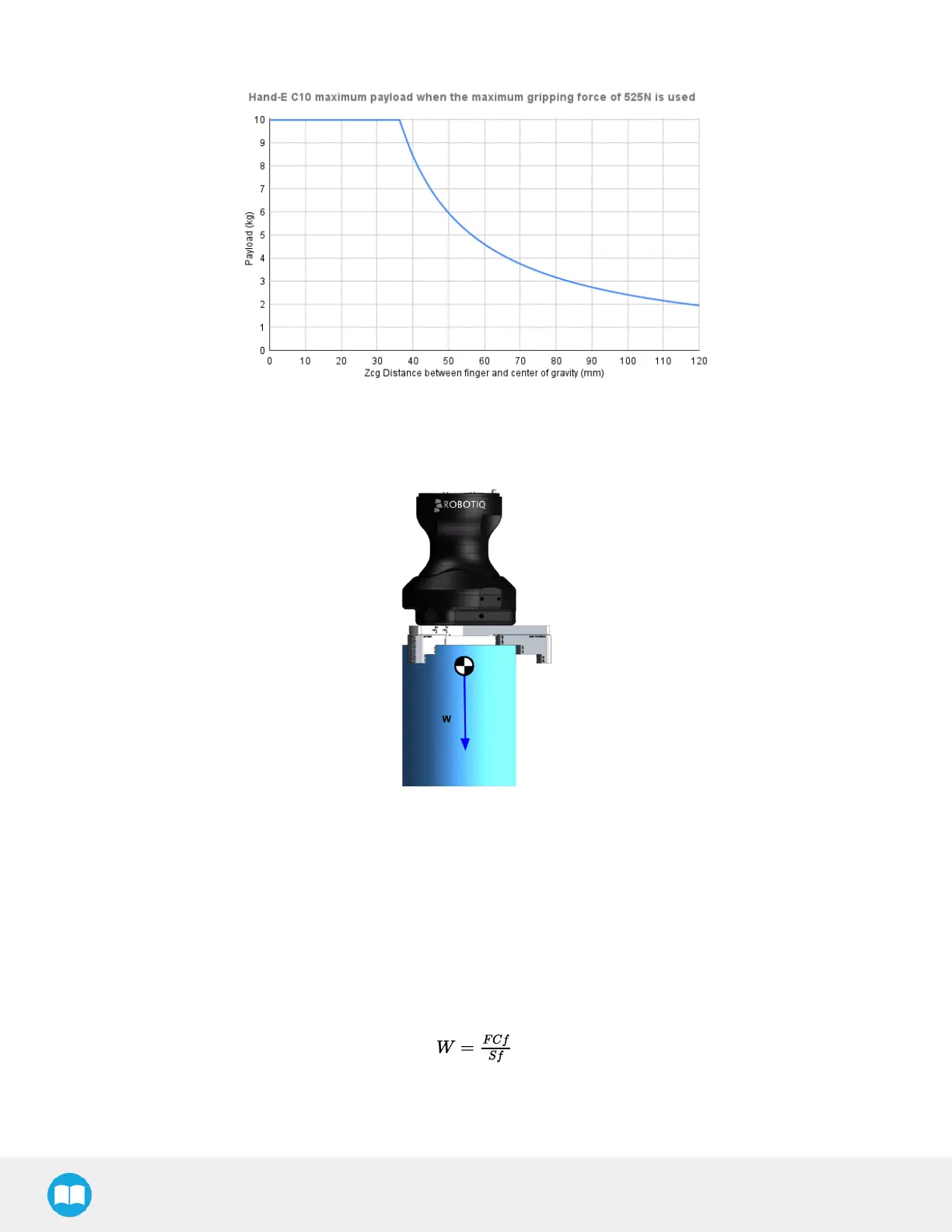
Use the following graphic to determine if the center of gravity of the object is properly positioned for the application.
5.2.2. Friction Grip Payload
Assess and validate the weight of the workpiece to make sure it does not fall off the gripper when transported by the robot.
A friction grasp consists in the object (payload) being held by the Gripper's pads solely by friction in whichever part of the robot
trajectory.
Calculate the friction force to determine the weight of the workpiece. The friction force depends on the friction coefficient
between the finger and the object as well as the actual gripping force of the Gripper. The following equation can be used to
calculate the maximum load that can be sustained during a friction grasp, where:
l
W is the load force sustainable by the friction grasp
l
F is the force applied on the load by the Gripper's finger pads (525 N if the force setting is at 100%)
l
C
f
is the friction coefficient between the Gripper's finger and the load
l
S
f
is a safety factor to be determined by the robot integrator
108