Robotiq Hand-E C10 Gripper Instruction Manual
The calculation of the payload mass has to account for the acceleration, the gravity and the external forces.
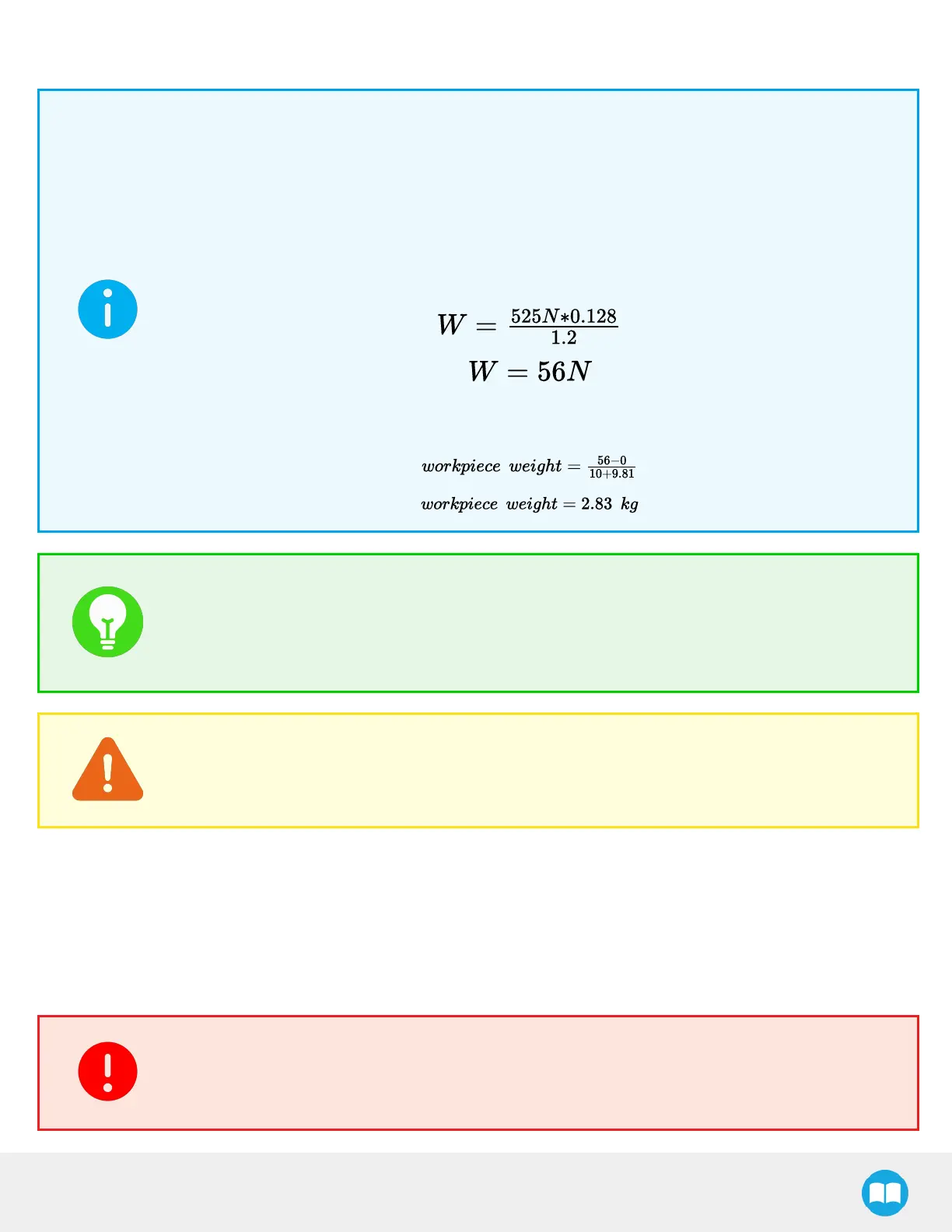
INFO Example—Consider the Following
l
Stainless steel stepped fingers
l
A lubricated workpiece (exposed to cutting oils in a machine tending application)
l
A tested static friction coefficient of 0.3
l
The maximum grasping force of 525 N
l
A safety factor of 1.2
l
A robot acceleration of 10 m/s
2
l
No external forces
TIP - Rule of Thumb
If workspiece weigh is to low for the application, robot acceleration can be reduce. In most applications a
acceleration of 10m/sec2 by the robot is more than enough to reach proper cycle time. A proper robot
acceleration would be around 5m/sec2. For higher payload, robot acceleration can be reduce lower than
5m/sec2
CAUTION
The most important factor in payload and weight calculations is the friction coefficient.
Robotiq recommends assessing, validating and testing the resulting friction coefficient.
5.2.3. Moment and Force Limits for Standard Fingertips
In some cases, custom finger design is required (mechanical notch, form fit grasp) to increase gripper’s capacity. The maximum
allowable moment and force values on the rack must not be exceeded. The maximum moment and force values are independent
of the grasp force the Gripper applies on the payload (175N per finger).
Refer to the Maximum payload determination section.
WARNING
Always operate within range.
Calculation of maximum moment and force values should include robot acceleration and safety factors.