Robotiq Hand-E C10 Gripper Instruction Manual
3.5.4. Coupling to Tool Connector for I/O Coupling
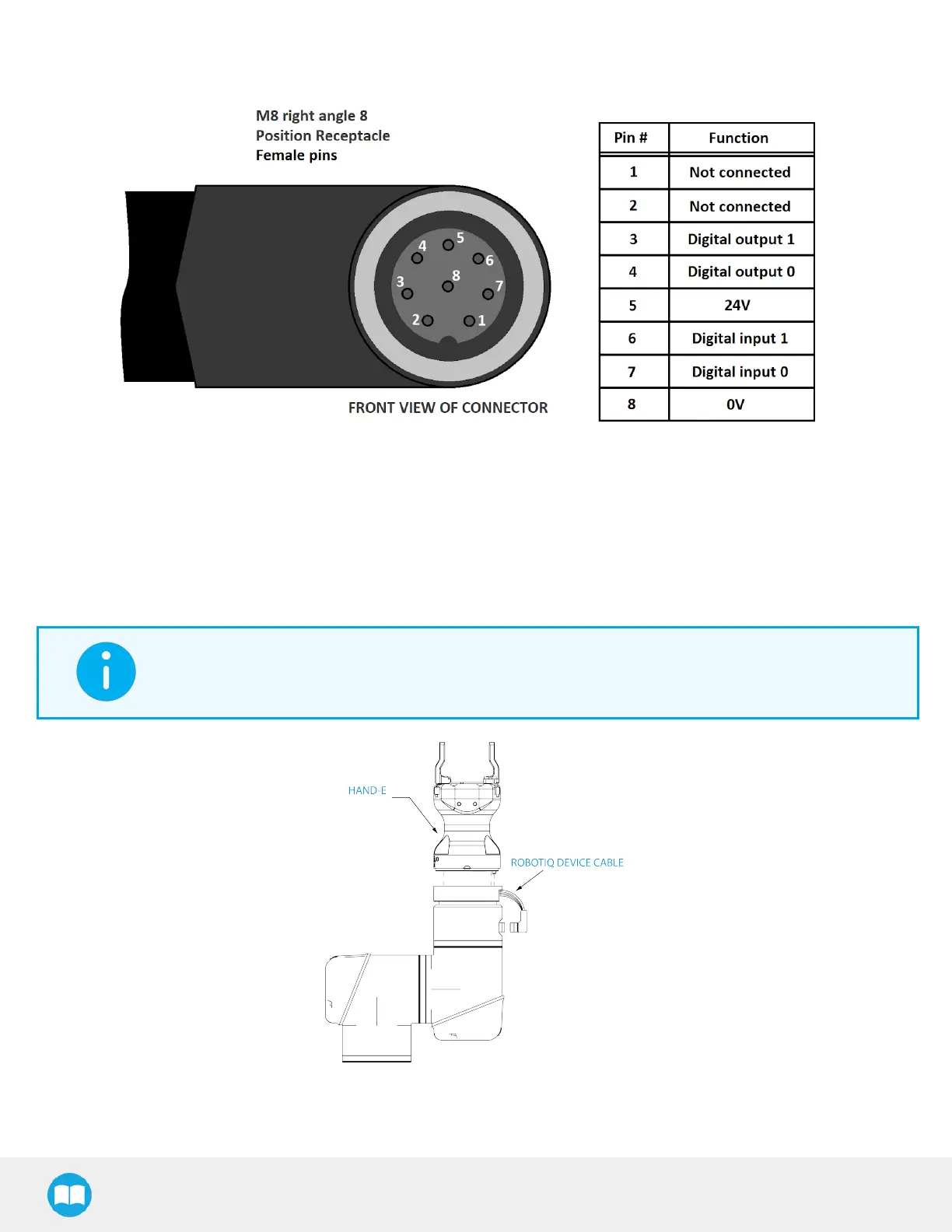
Fig. 3-16: Pinout of the I/O Coupling
3.5.5. Coupling to Wrist for e-Series
Single Gripper
The figure below represents the wiring schematic of Hand-E C10 with a coupling connecting directly to the robot wrist.
INFO
The following images display the Hand-E Gripper, but the same structure applies.
Fig. 3-17: Robotiq Hand-E C10 with Device Cable Wiring Scheme
30