Robotiq Hand-E Gripper Instruction Manual
5.1.3. Fingers and Fingertips
The contact grip points for Hand-E are its two fingertip pads.
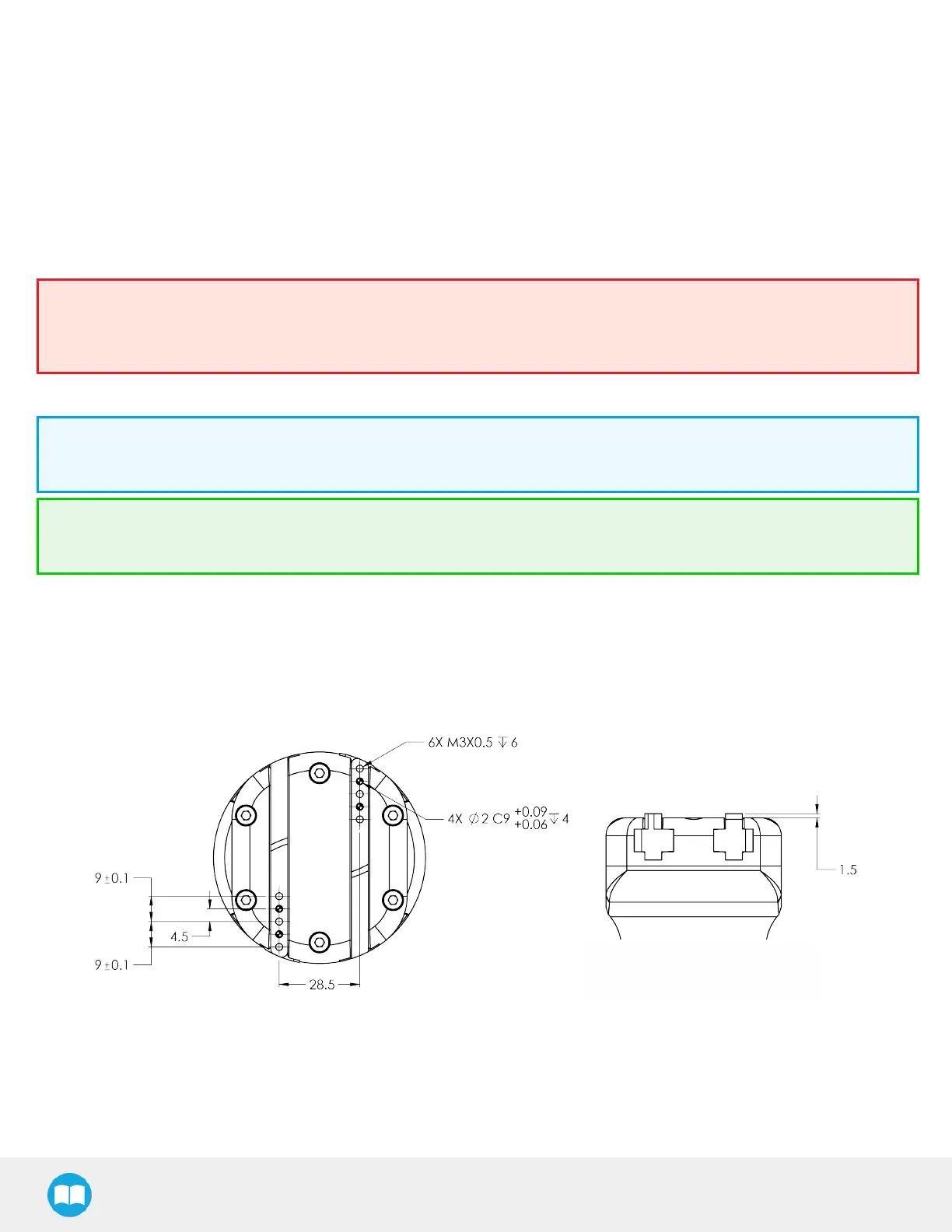
Robotiq offers a selection of fingertips (see the Spare Parts, Kits and Accessories section), and users can create custom fingertips. The
figure below represents the fingertip holder, the permanent, non customizable part of the gripper finger on which the fingertip must be
mounted. Hand-E is shipped mounted with standard flat rubber (NBR) overmolded fingers.
Custom fingertip design must meet the following specifications:
l Forces exerted at the end of the fingertips must not exceed 100 N , regardless of the direction. Please refer to the Moment and Force
Limits section for more details.
Warning
The following limits must be respected at all times.
Calculation of maximum moment and force should include robot acceleration and safety factors.
l Refer to the Mechanical Specifications section to evaluate the grip force according to your fingertip design.
Info
You can install custom fingertips directly on the rack or on the fingertip holder.
Tip
Fingertips can be mounted directly on racks or fingertip holders.
Rack
Fingers are installed directly on a rack. You may customize your own fingers to mount them on this part. NBR overmolded flat fingers
(HND-FIN-MLD-KIT) are mounted directly onto it.
Fig. 5-3: Racks in rack housing
104