Robotiq Hand-E Gripper Instruction Manual
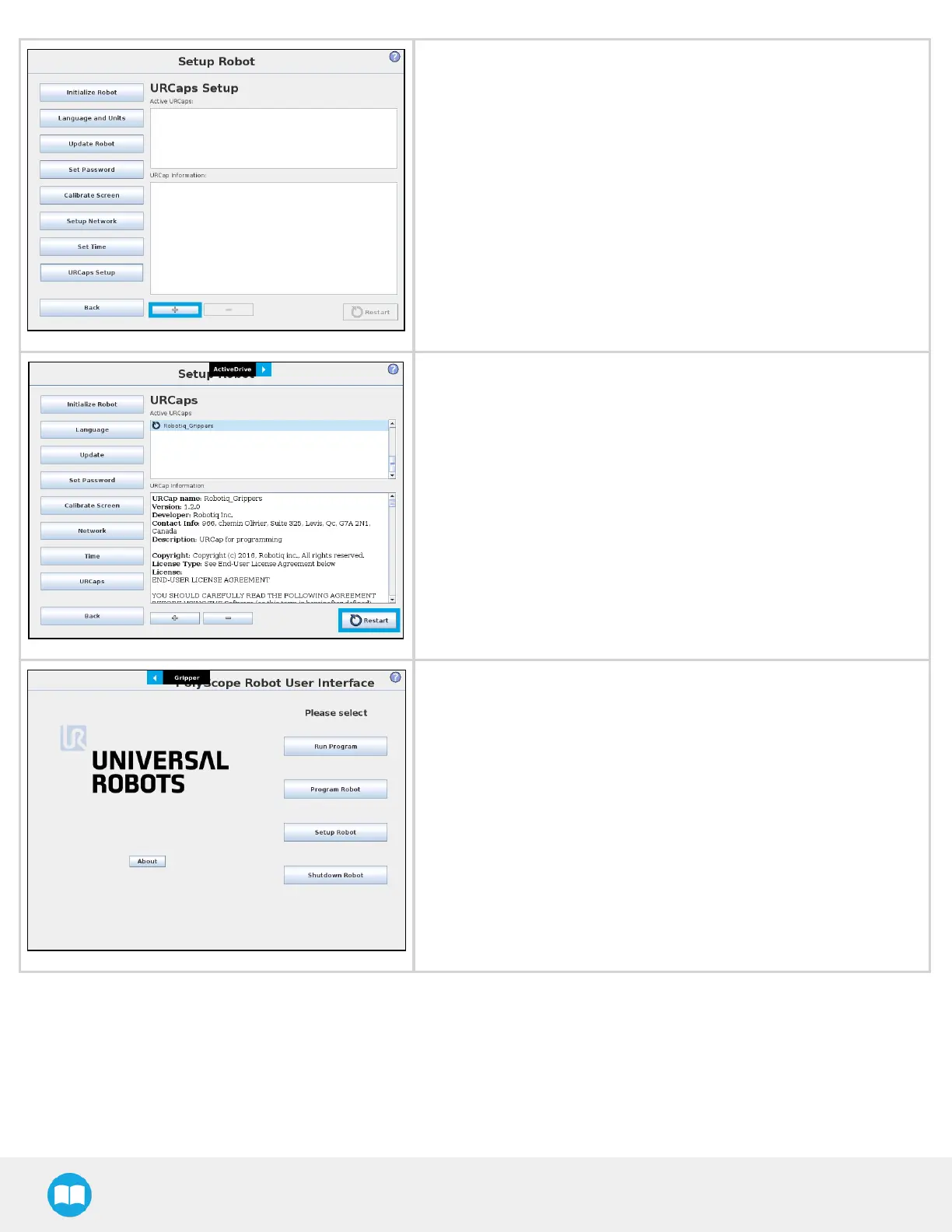
l Tap the plus button (+) to add the gripper’s URCaps package.
l Open Robotiq_Grippers-X.X.X.urcap from the USBstorage device.
l If an I/O coupling is present, tap the plus button (+) to add the Wrist
Connection’s URCaps package. Open Robotiq_Wrist_connection-
X.X.X.X.urcap from the USB storage device.
l Restart PolyScope to complete the URCap installation. By doing so, you
accept the License Agreement that is detailed in the URCap information
text box (please refer to the License Agreement section).
l When PolyScope reopens, the Gripper Toolbar will appear on
thescreen.
36