222
223
231
230
241
240
228
229
233
232
242
234
**
Encoder 0
Processing
**
Encoder 1
Processing
Motor
Simulator
Spd Calc
251
250
762
FdbkLoss
Detect
LPass
Filter
X
300
73
72
249
** Feedback
Option Card 0
Processing
259
268
272
273
274
275
276
260
269
Stegmann0 Cnfg
Resolver 0 Config
Fdbk Option ID
Reslvr0 SpdRatio
Reslvr0 Carrier
Reslvr0 In Volts
Rslvr0 XfrmRatio
Reslvr0 CableBal
Stegmann 0 Status
Resolver 0 Status
FB Opt0 Spd
Fdbk
FB Opt0 Posit
MtrSpd Simulated
MtrPosit Simulat
Encdr1 Position
Encdr1 Spd Fdbk
Encdr0 Spd Fdbk
Encdr0 Position
Mtr Fdbk Alt
Sel
Mtr Fdbk Sel Pri
Encdr 0/1 Error
Encoder 0 PPR
Encoder 1 PPR
Encdr 0/1 Config
Position Fdbk
Logic Command
(TachLoss Rst)
Motor Spd Fdbk
Spd Fdbk Scale
Scaled Spd Fdbk
Speed/Posit Fdbk
(Task 1)
to Speed
Control [5A4]
to Position Control
[13A4] & [14B4]
227
Motor Speed Est
225Virt Edge/Rev
252FB Opt1 Posit
1
2
3
4
5
6
BA
D
C
FE HG
I
To HIM Display
Motor Posit Est
0
1
2
4
5
226
263
Heidenhain0 Cnfg
264
Heidenhain 0 Stat
0
1
2
4
5
0
1
3
4
5
6
0
1
777
Posit Fdbk Sel
Accum
1
1-Z
-1
Accum
1
1-Z
-1
Encoder 0/1 Registration
235
236
238
237
Encdr0 RegisLtch
Enc0/1 RegisCnfg
Enc0/1 RegisCtrl
Enc0/1 RegisStat
239 Encdr 1 RegisLtch
Option 0/1 Registration
257
254
255
256
Opt 0 Regis Ltch
Opt0/1 RegisCnfg
Opt0/1 RegisCtrl
Opt0/1 RegisStat
258 Opt 1 Regis Ltch
151 2
155 12
153 16
Control Options
(AutoTach Sw)
Logic Status
(TachLoss Sw)
1
0
4
5
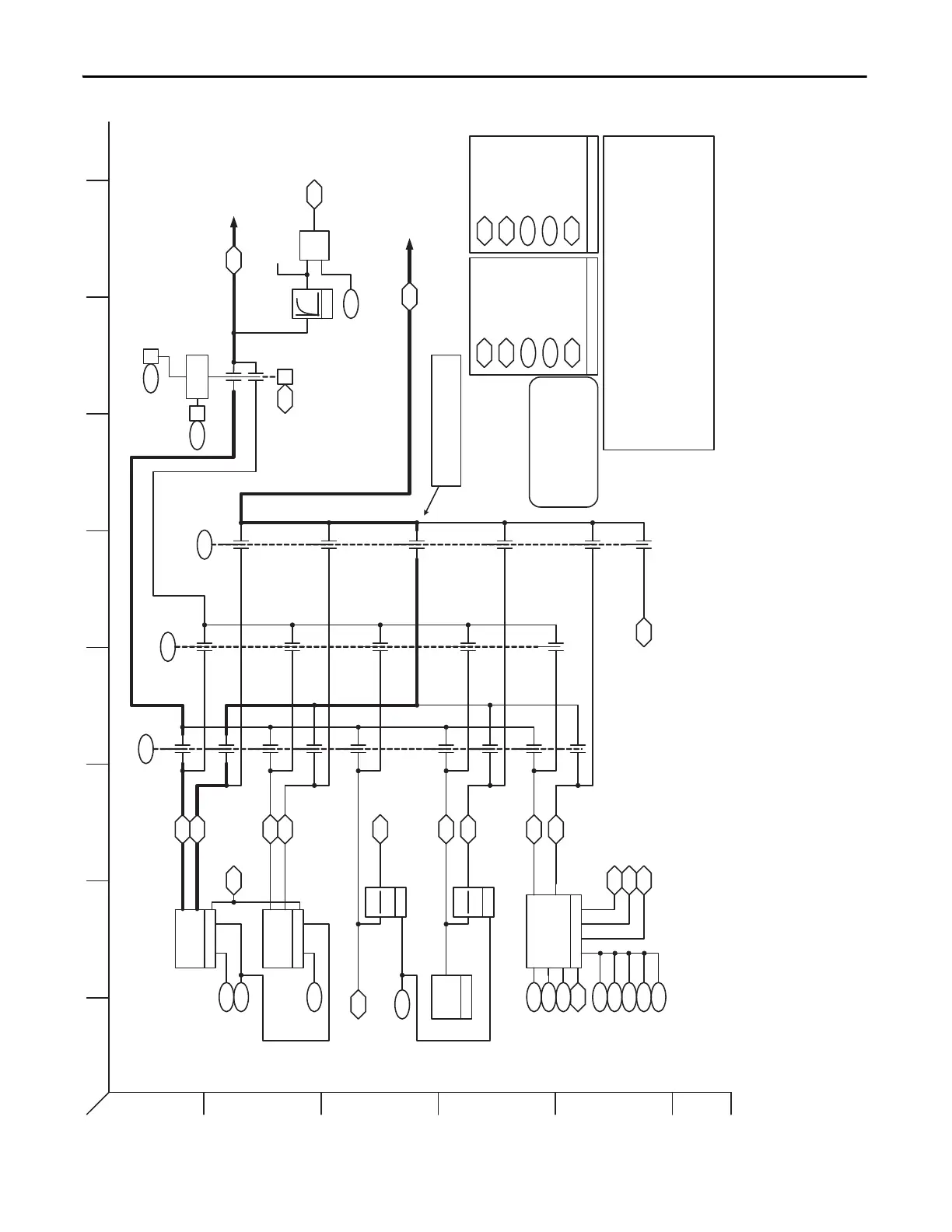
When p777 = 3, Position Fdbk will
follow p 222 [Mtr Fdbk Sel Pri ]
**
Feedback Processing
Each Feedback device has an FIR filter with the number of taps adjustable . Default
setting for each FIR filter is 8 taps. Increasing the number of taps increases the
filtering of the Speed feedback signal . Reducing the number of taps reduces the
filtering of the Speed feedback signal. See parameter descriptions for the following .
Para
meter 233 Encdr 0/1 Config Parameter 259 Stegmann0 Config
Parameter 263 Heidenhain 0 Cnfg Parameter 268 Resover0 Config
TestPoints
P245 Spd Fdbk TP Sel
P246 Spd Fdbk TP RPM
P247 Spd Fdbk TP Data
 Loading...
Loading...










