Motor components
5.4 Gearbox
1FT7 Synchronous Motors
Configuration Manual, (PFT7S) 01/2009, 6SN1197-0AD13-0BP2
213
6\QFKURQRXVPRWRU
*HDUER[
Q
0RW
Q
$
L
Q
$
Q
0RW
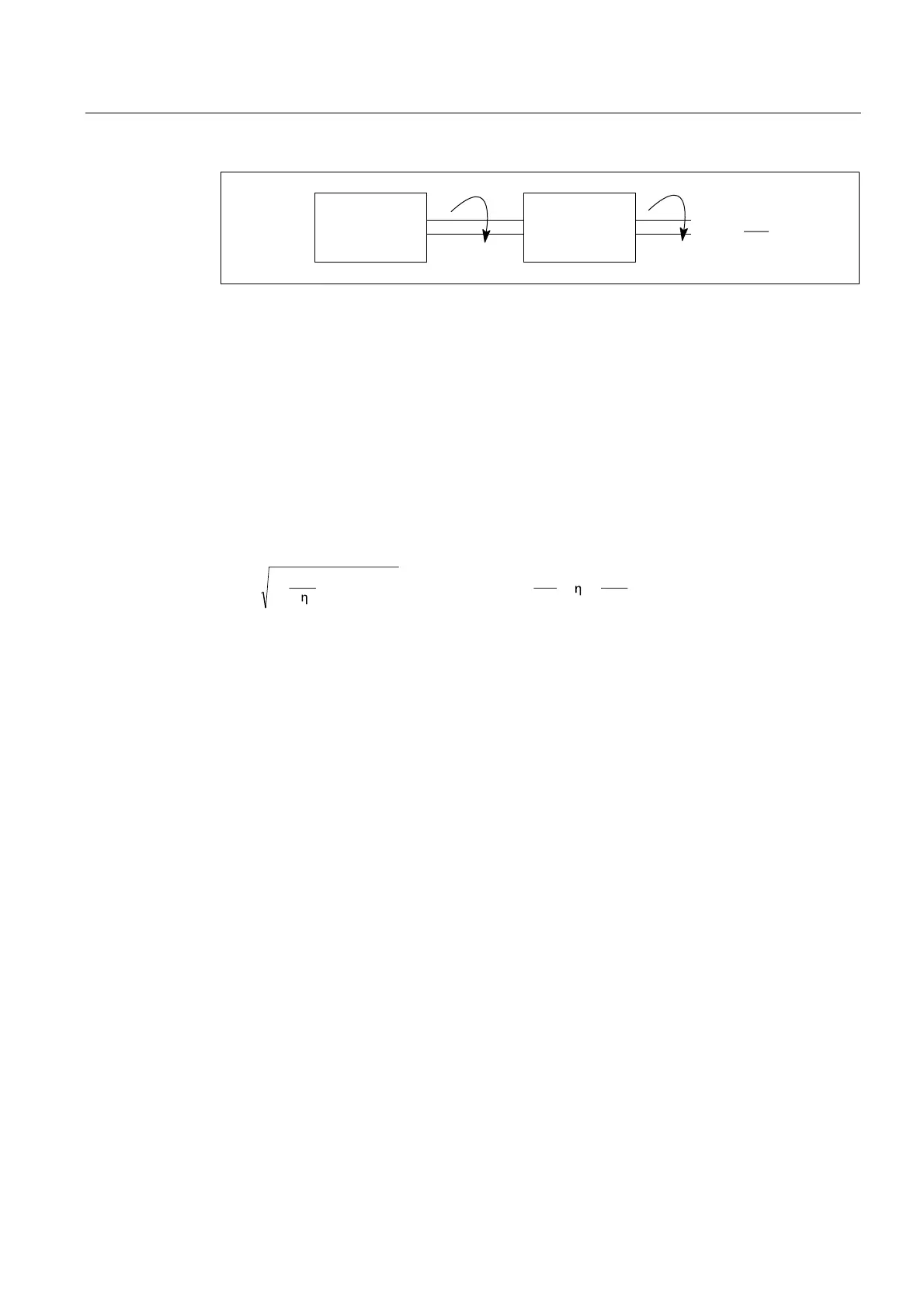
Figure 5-4 Gear ratio
The load torque and the required start-up velocity define the gearbox output torque, the
output speed and therefore the output power.
The required drive power is calculated from this:
P
out
[W] = P
mot
[W] ∙ η
G
= (π/30) ∙ M
mot
[Nm] ∙ n
mot
[RPM] ∙ η
G
Dimensioning for S1 duty
The gearbox itself generates heat due to friction and acts as a thermal barrier preventing
heat from being dissipated through the motor flange. This is the reason that the torque must
be reduced for S1 duty.
The required motor torque is calculated as follows:
6WU Z
0RW
9
*
DE
0RW
PLt
99
()
2
7
*
22
•
1
60
•b•a=)+
•i
(=
R
kn
MMM
M
M -
-
M
mot
Motor torque [Nm]
M
V
Calculated "torque loss" [Nm]
a π/3 for 1FT7 motors supplied with sinusoidal current
b Weighting factor for gearbox losses (without dimensions); b = 0.5
η
G
Gearbox efficiency
i Gearbox ratio (i > 1)
k
T
Torque constant [Nm/A]
M
out
Gearbox output torque [Nm]
n
A
Output speed of gearbox [rpm]
n
mot
Motor speed [RPM]
R
ph
Resistance when hot of the motor phase [Ω]; R
phw
= 1.4 • R
ph
(see chapter
headed "Technical data and characteristics")
P
out
Gearbox output power [W]
P
mot
Motor power [W]
π pi = 3.1416

 Loading...
Loading...