Motion control is easy
10.5 Motion control instructions
Easy Book
Manual, 03/2014, A5E02486774-AF
223
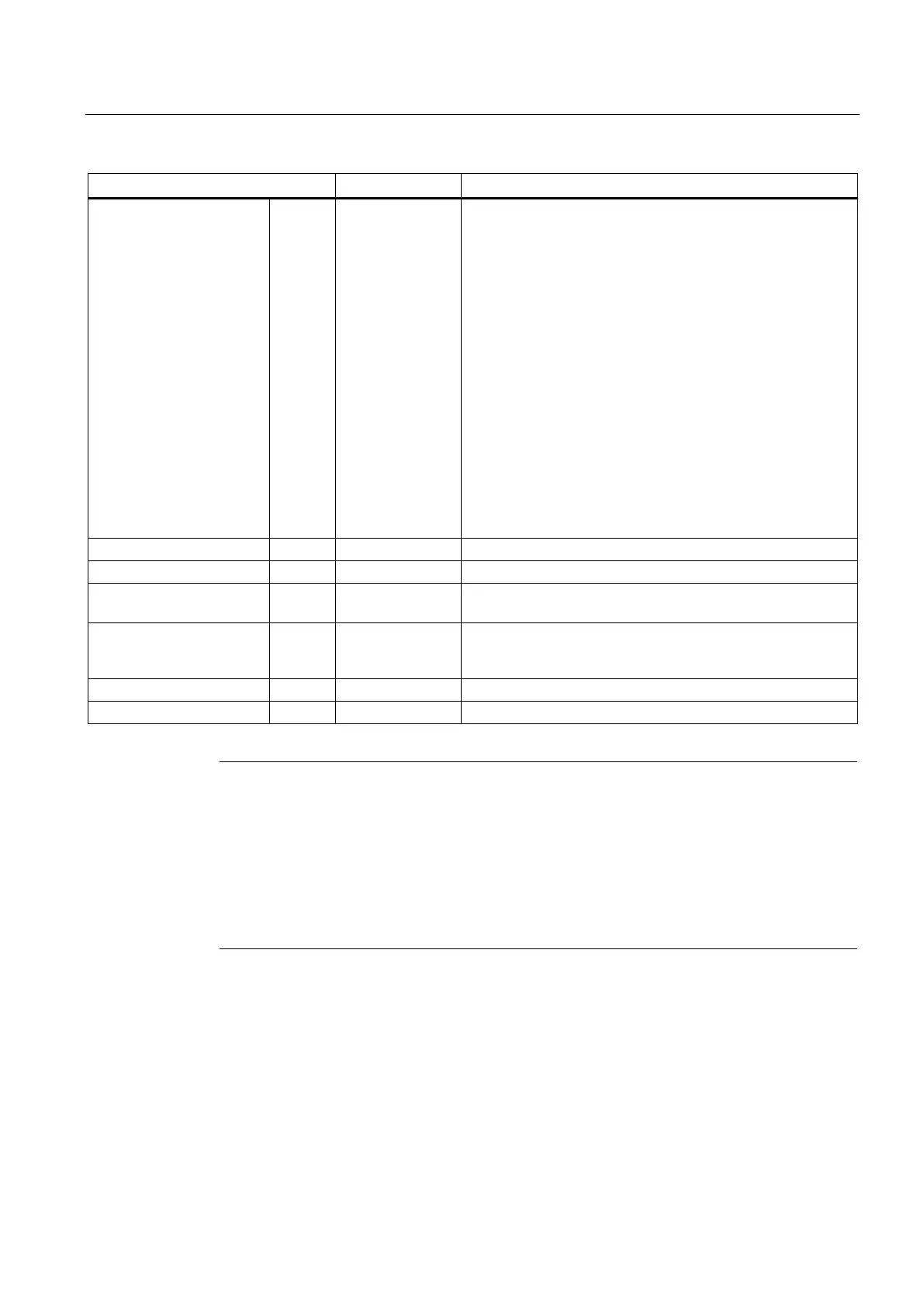
Mode IN Int Homing mode
• 0: Direct homing absolute
New axis position is the position value of parameter
"Position".
• 1: Direct homing relative
New axis position is the current axis position + position
value of parameter "Position".
• 2: Passive homing
Homing according to the axis configuration. Following
homing, the value of parameter "Position" is set as the
new axis position.
• 3: Active homing
Reference point approach in accordance with the axis
configuration. Following homing, the value of parameter
"Position" is set as the new axis position.
TRUE = The task is being executed.
CommandAborted OUT Bool TRUE = During execution the task was aborted by another
Error OUT Bool TRUE = An error has occurred during execution of the task.
The cause of the error can be found in parameters "ErrorID"
Error ID for parameter "Error""
Error info ID for parameter "ErrorID"
Note
Axis homing is lost under the following conditions
•
Disabling of axis by the MC_Power instruction
Switchover between automatic control and manual control
Upon start of active homing (After successful completion of the homing operation, axis
homing is available again.)
After power-cycling the CPU
After CPU restart (RUN-to-STOP or STOP-to-RUN)
To home the axis, follow these steps:
1. Check the requirements indicated above.
2. Initialize the necessary input parameters with values, and start the homing operation with
a rising edge at input parameter "Execute".
3. If output parameter "Done" and technology object tag <Axis
name>.StatusBits.HomingDone indicate the value TRUE, homing is complete.

 Loading...
Loading...















