Parameter Manual
Operating Instructions, 08/2013, 6FC5397-8EP40-0BA0
193
Machine data
2.4 Axis-specific machine data
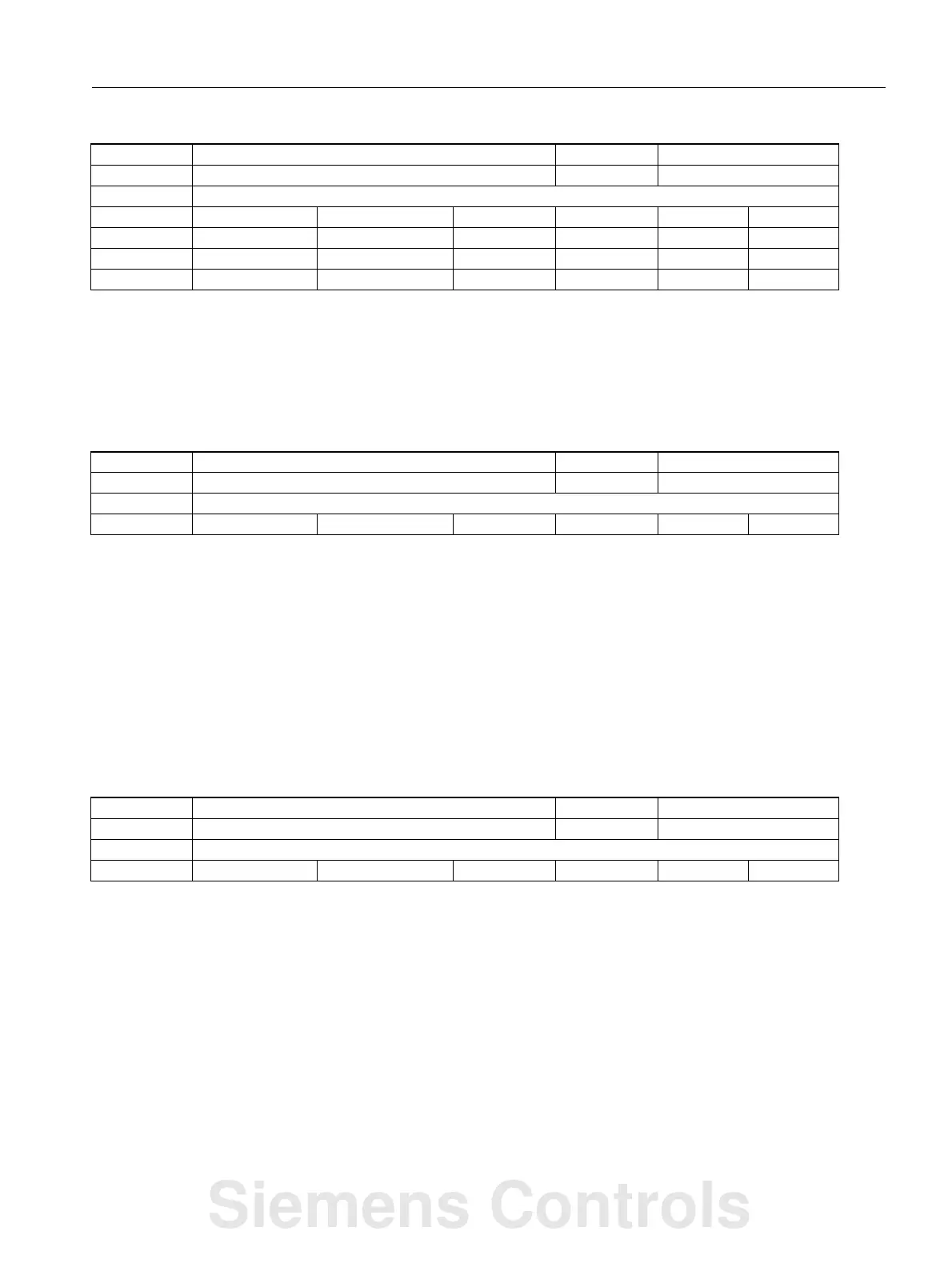
Description: The type of speed setpoint output is entered into this MD:
0: Simulation (no HW required)
1: Setpoint output active (differentiation via hardware configuration)
2: Semi servo -only when the hardware is available onboard
3: Reserved
4: Reserved
Note: instead of value 4, MD30132 $MA_IS_VIRTUAL_AX should now be used.
Description: Only for PROFIdrive, special application of analog additional drives:
Unipolar output driver (for unipolar analog drive actuator):
Only positive set speeds are supplied to the drive, the sign of the set speed
is separately output in its own digital control signal.
Input value "0":
Bipolar output with pos./neg. set speed (this is the normal case)
Input value "1":
0. Digital bit = servo enable
1. Digital bit = neg. direction of travel
Input value "2": (linking of enable and direction of travel signals):
0. Digital bit = servo enable pos. direction of travel
1. Digital bit = servo enable neg. direction of travel
Description: The number of encoders of the axis or spindle is to be entered in the MD for
actual position value sensing (the differentiation between direct and indi-
rect measuring systems, i.e. the locations at which these encoders are
installed, is then specified, for example, in MD31040 $MA_ENC_IS_DIRECT).
For simulation axes/spindles, MD30200 $MA_NUM_ENCS > 0 must be specified for
referencing.
30130 CTRLOUT_TYPE A01, A11 G2,M3,S9
- Output type of setpoint BYTE PowerOn
-
808d-me42 1 0 0 2 2/2
808d-me62 1 0 0 1 2/2
808d-te42 1 0 0 2 2/2
808d-te62 1 0 0 1 2/2
30134 IS_UNIPOLAR_OUTPUT A01 G2
- Setpoint output is unipolar BYTE PowerOn
-
-1 0 0 2 2/2
30200 NUM_ENCS A01, A02, - G2,R1,Z1
- Number of encoders BYTE PowerOn
-
-- 1 0 1 2/2
Siemens Controls