Fundamentals of EtherCAT
Operation manual
ID 441896.05
WE KEEP THINGS MOVING
19
5
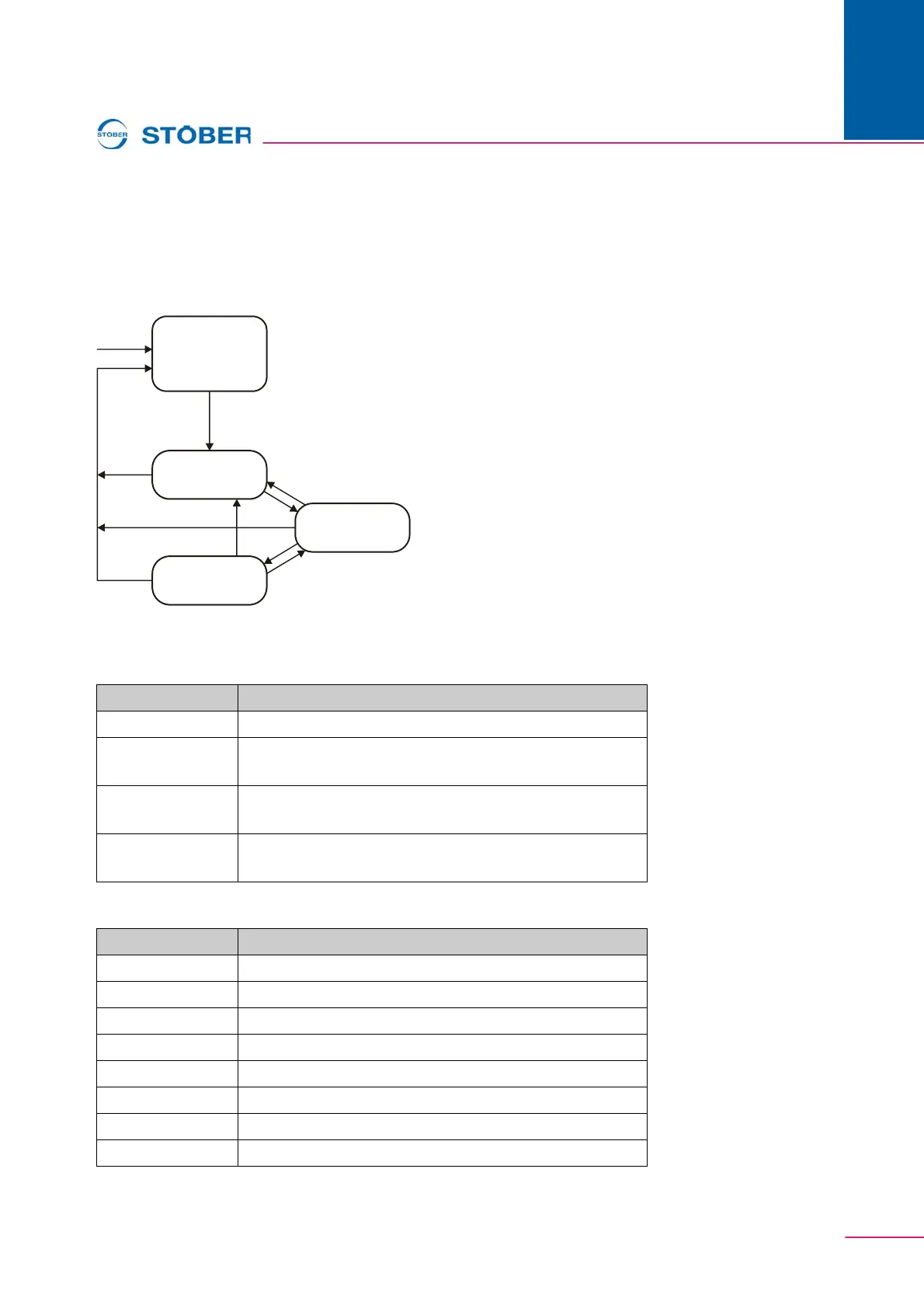
5.2 State machine
The following state machine is implemented in every EtherCAT slave. Which
communication services are active via EtherCAT are defined for each state. The
EtherCAT master controls the state machine.
Fig. 5-4 EtherCAT state machine
State table:
State transitions:
State Description
Initialising Inverter configuration starts. Stored values are loaded.
Pre-Operational Inverter is ready for parameterization in preparation for
actual operation via SDO.
Safe-Operational EtherCAT master reads actual values from the inverter via
PDO and SDO.
Operational EtherCAT master and inverter exchange reference values
and actual values via PDO and SDO.
Transition Actions
IP Start mailbox communication
PI Stop mailbox communication
PS Start input update
SP Stop input update
SO Start output update
OS Stop output update
OP Stop output update, stop input update
SI Stop input update, stop mailbox communication
Initializing
Pre-
Operational
Operational
Safe-
Operational
Power
on
(PI)
(IP)
(SI)
(OI)
(OP)
(PS)
(SP)
(OS)
(SO)
 Loading...
Loading...



