I Hardware Installation Manual 2. Safety Functions and Interface
8
2. Safety Functions and Interface
2.1 Overview
The control system of the Techman Robot features a series of built-in safety-related functions, and
provides an interface for connecting with external safety devices.
For human-machine collaborative tasks, the user or system integrator must configure the
safety-related parameters based on the results of the risk assessment. For tasks during which
human and machine are separated, evaluate the selection and configuration of external
protection equipment. Failure to do so may result in personal injuries or death.
For instructions on how to configure the safety-related parameters in the UI, refer to Section 2.5.
For instructions on how to connect external safety devices to the system, refer to Chapter 5.
Note:
1. The user or system integrator should configure the safety-related parameters based on the
results of the risk assessment.
2. If any of the safety-related functions is triggered, protection stop is activated. Stop time is
provided in Appendix A and this time should be considered as part of the task risk assessment.
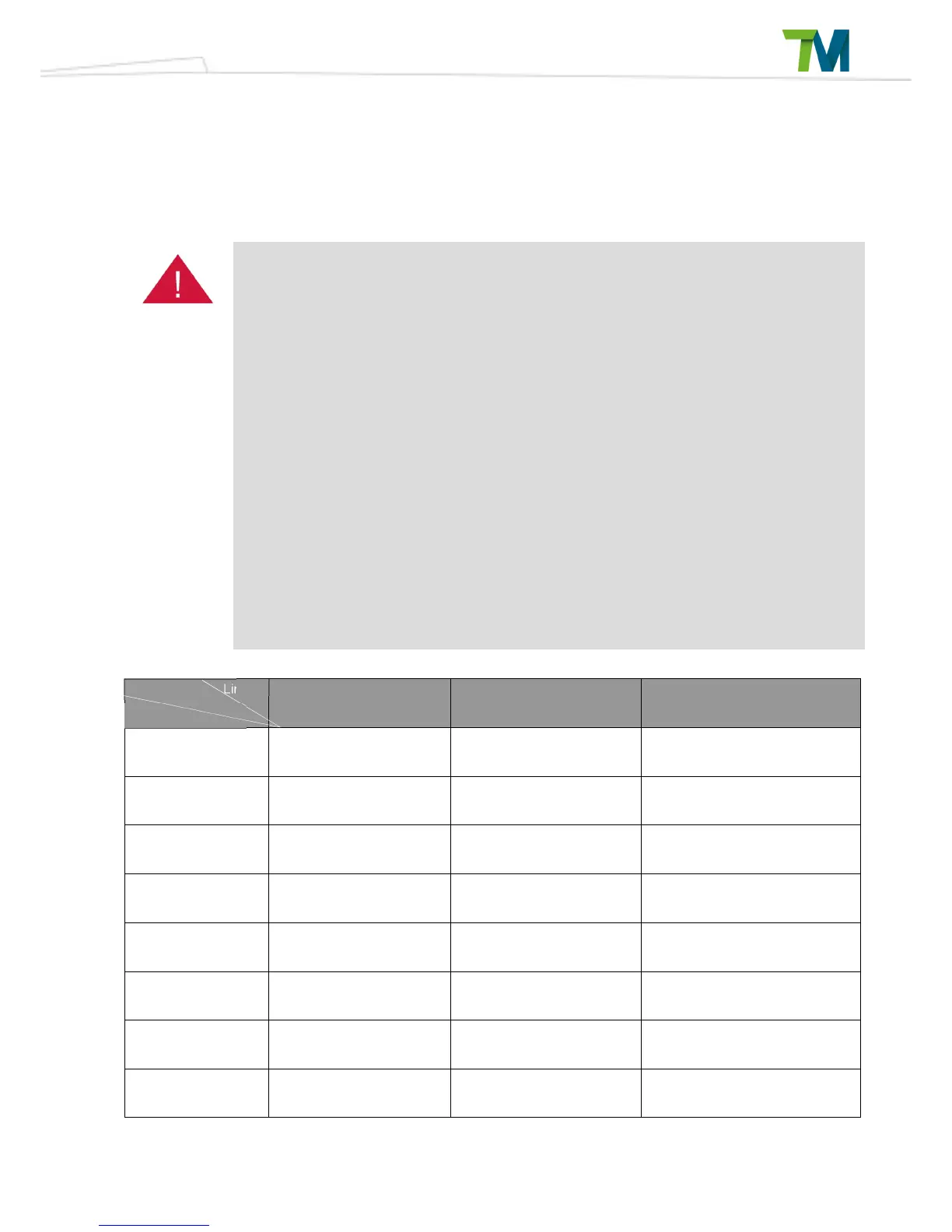
The Techman Robot System limits physical values such as offset, speed, force, or even
momentum and power, for the robot arm, tool end, and each movable axis. These are monitored
and protected by dozens of safety-related protection functions through the real-time system. The
figure below lists each protective function.
Location Speed/Momentum Force/Power
Robot
N.A Maximum robot
momentum
Maximum robot power
Tool end N.A Maximum speed
of tool end
Force Applied to
Tool Endpoint
Axis 1 Minimum/Maximum
axis position
Maximum axis speed Maximum axis torque
Axis 2 Minimum/Maximum
axis position
Maximum axis speed Maximum axis torque
Axis 3 Minimum/Maximum
axis position
Maximum axis speed Maximum axis torque
Axis 4 Minimum/Maximum
axis position
Maximum axis speed Maximum axis torque
Axis 5 Minimum/Maximum
axis position
Maximum axis speed Maximum axis torque
Axis 6 Minimum/Maximum
axis position
Maximum axis speed Maximum axis torque