I Hardware Installation Manual 2. Safety Functions and Interface
17
2.5.1 Operating Position
Except for Hand Guide Mode, for correct operating positions, the user should stay outside of the
motion range of the robot to perform operations. At least one emergency switch is installed
outside of the motion range of the robot. When no motion limit is set for the robot, the motion
range of the robot is equal to the maximum motion range of the robot arm (refer to Section 4.2.1).
When the user sets a limit for the TM Robot, he/she can avoid the situation whereby all
operations have to be out of the maximum motion range of the robot arm.
The robot stick should be placed in an area that the robot cannot reach. The user should also
make sure that the movement of the robot will not be within any area where personnel will enter
to press any buttons on the robot stick.
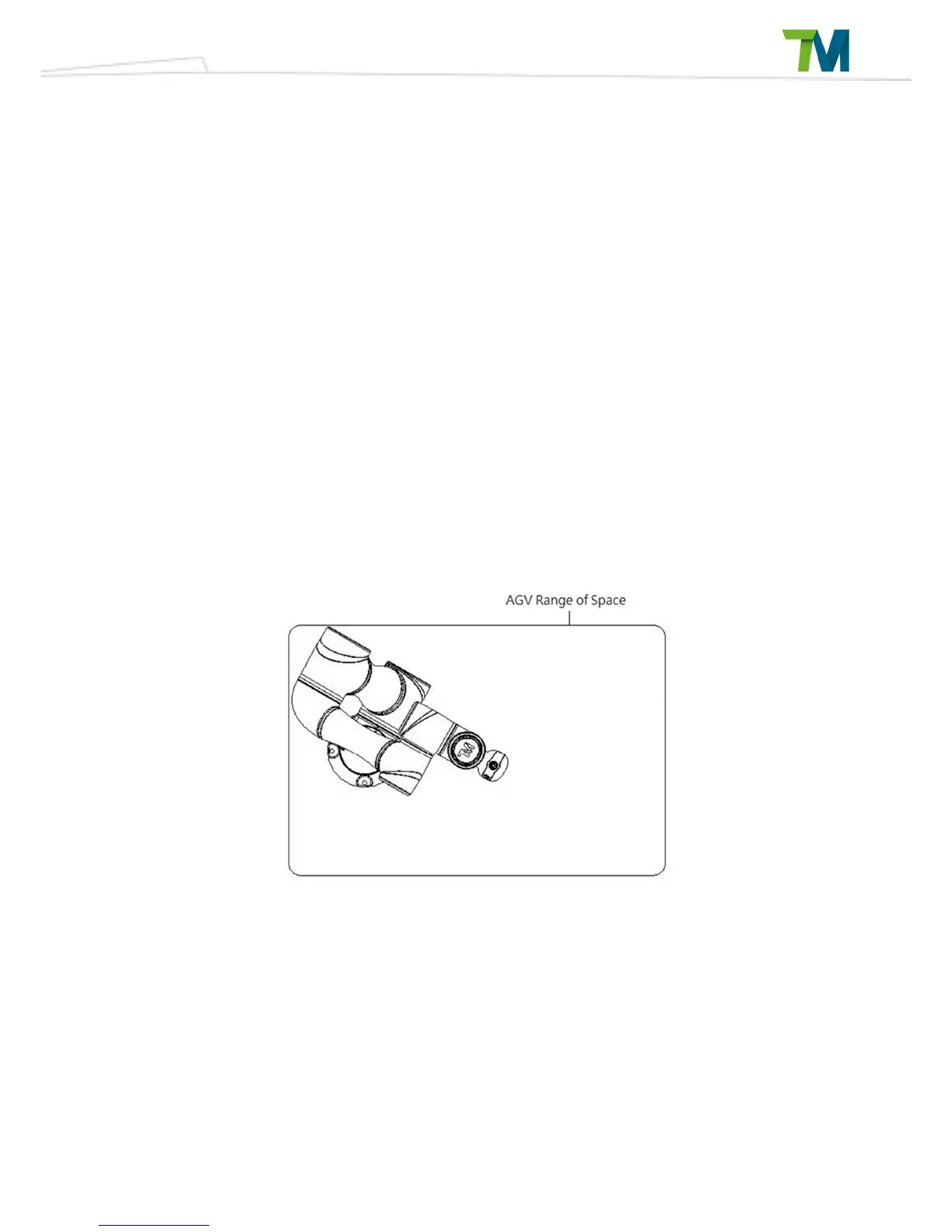
2.5.2 Operating Position of TM Robot with AGV
When TM Robot is placed on the AGV and whilst it is in operation, user should pause the TM
Robot and the TM Robot itself should not exceed the range of AGV space.
Top view of TM Robot placed on the AGV