I Hardware Installation Manual 2. Safety Functions and Interface
16
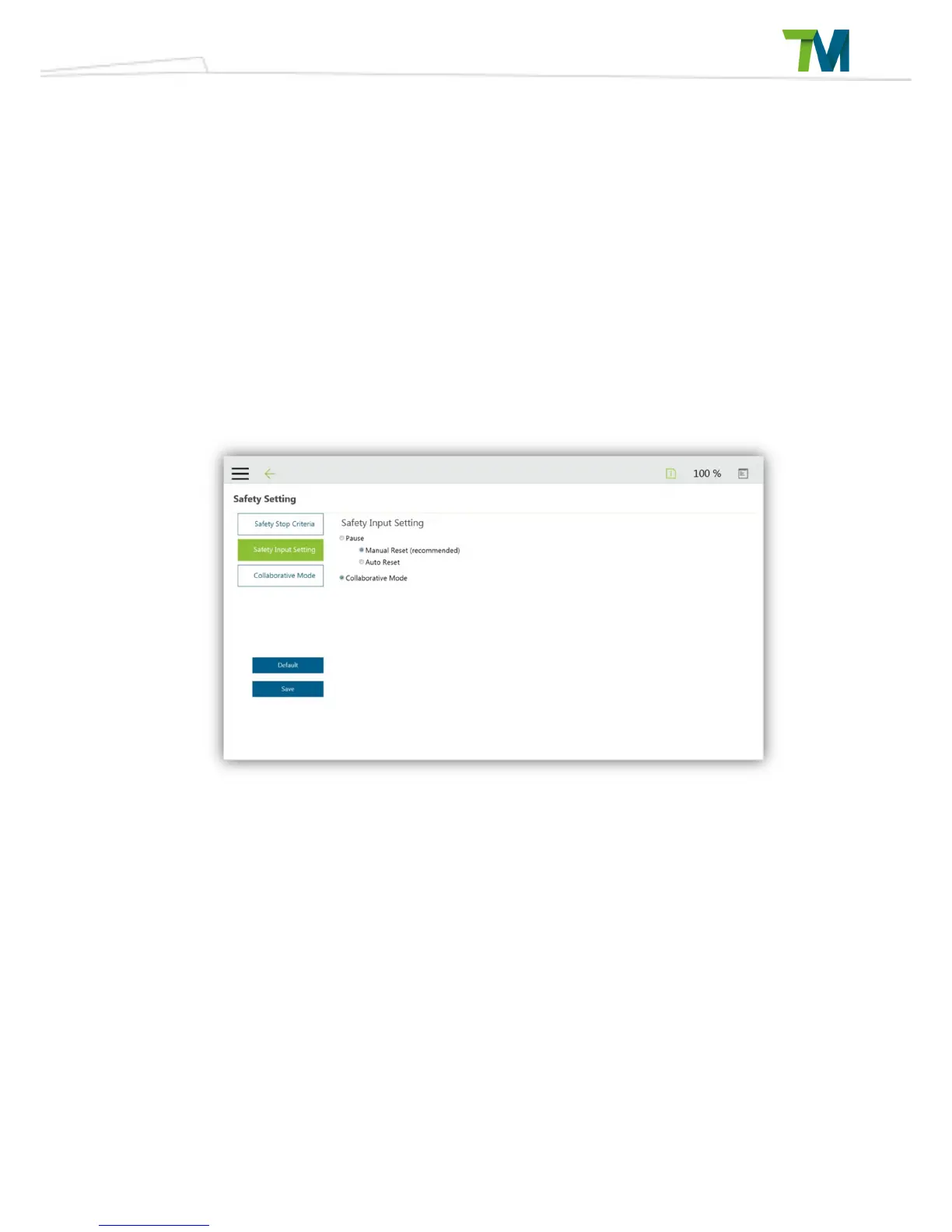
Safety IO Setting : Safety IO Setting (Please refer to description in 5.3.1) compose two modes: Pause
and collaboration mode. User can choose either pause or collaboration mode in safety IO setting.
Pause: Setting the configuration of the safety IO of TM Robot with risk evaluation, user can choose
either “manual reset” or “automatic reset” to manually restart or automatically restart the project when the
project is previously paused by safety IO triggered.
Collaboration mode: Setting the configuration of the safety IO of TM Robot with risk evaluation, user
can utilize the collaboration mode to switch the project from full speed mode to collaboration mode, when
safety IO triggered.
Collaboration Mode setting: Parameter configuration for TM Robot’s collaborative mode can be divided
into two parts. One is hazard configuration and the other is limit configuration. (Please refer to
description in 2.8.1).