I Hardware Installation Manual 2. Safety Functions and Interface
15
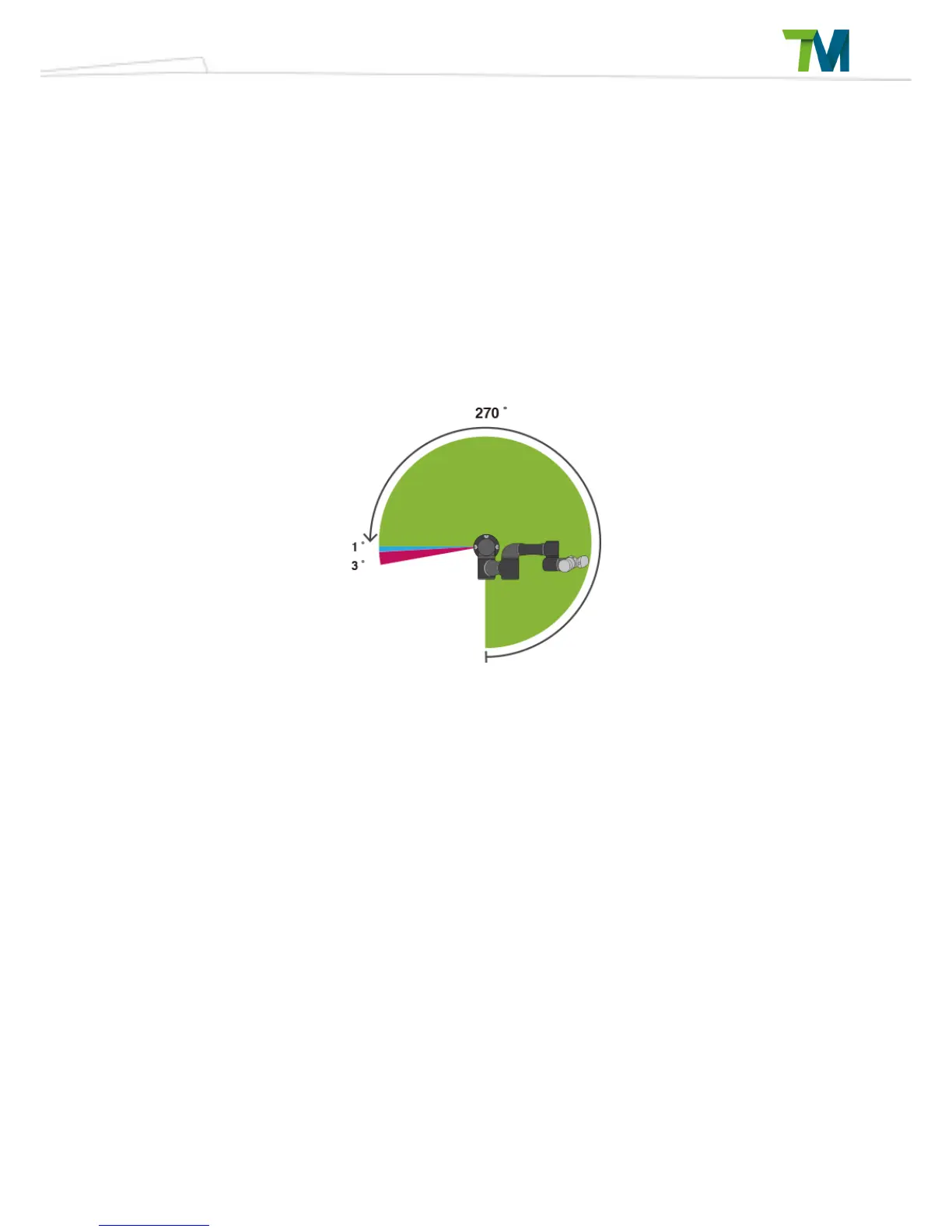
Min/Max Joint Position Setting:
If you set the Min/Max position of first joint with 270˚ and -270˚, then the angle range in 270˚~ 271˚and
-270˚~ -271˚ will become reducing range as the blue area showed in the picture. When the first joint
move into this range the basic moving speed of the robot will be switched to 250mm/sec for path motion
and 5% for PTP motion, to forming an angle buffer region to prevent possible overshoot to the joint limit.
At the same time, the angle range in 271˚~ 274˚and -271˚~ -274˚ is the 2nd buffer range for joint limit as
the red area in the picture. When the joint angle arrives this area robot will stop moving. User can only
operate the robot by press free robot button until robot leaves this area.