I Hardware Installation Manual 2. Safety Functions and Interface
12
The workspace explanation when J3 is almost in zero degree.
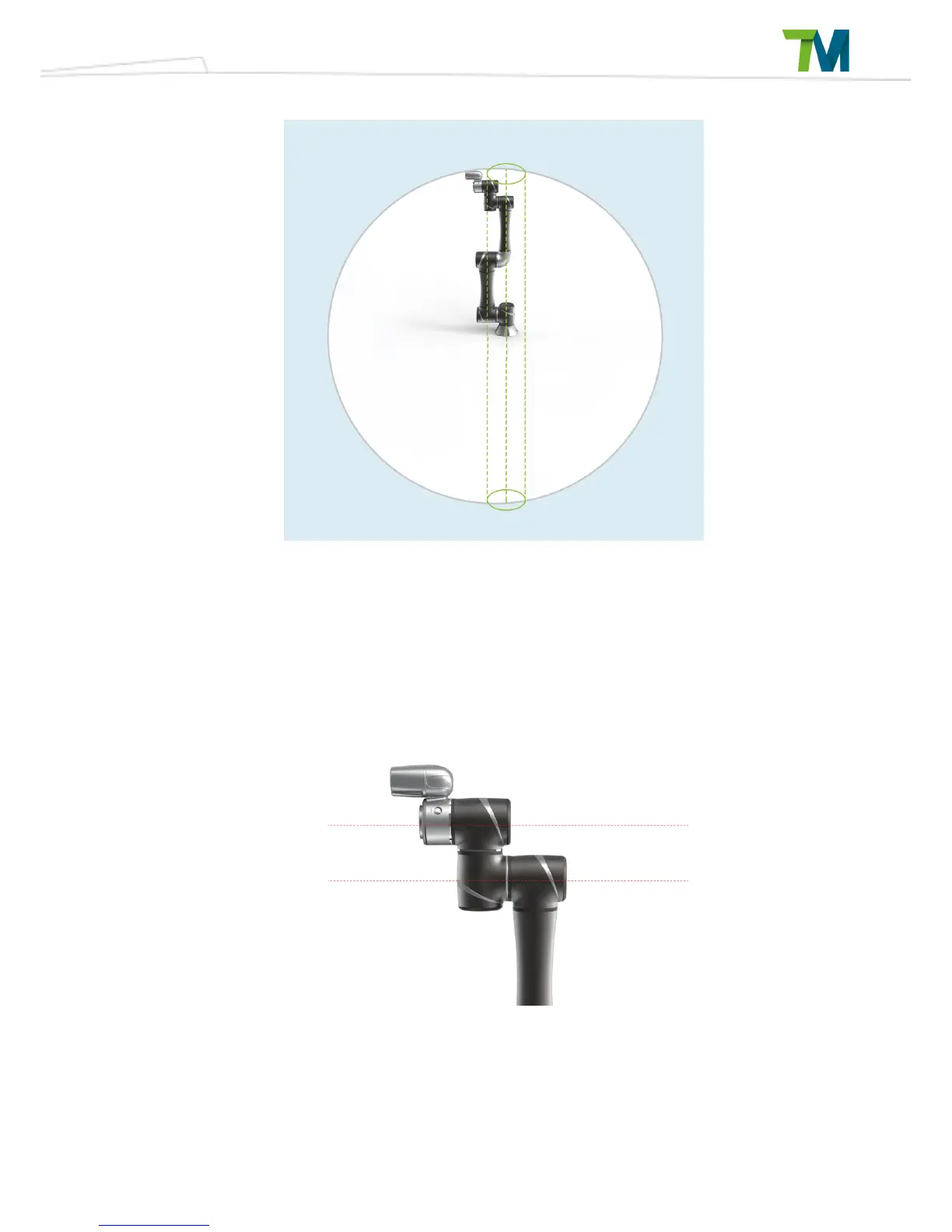
Wrist axis singularity:
In the wrist singularity position, the J4 and J6 line up each other. In this case, these joints will try and spin
180 degrees instantaneously. There is an infinite number of possible for J4 and J6 with identical axis
angle. Once situation mentioned occur, robot arm will stop and send out a warning.
There is an infinite number of solution space when axes J4 and J6 with identical axis angle.
Maximum working space
Extended singularity space