© Technosoft 2007 8 IBL2403 Technical Reference
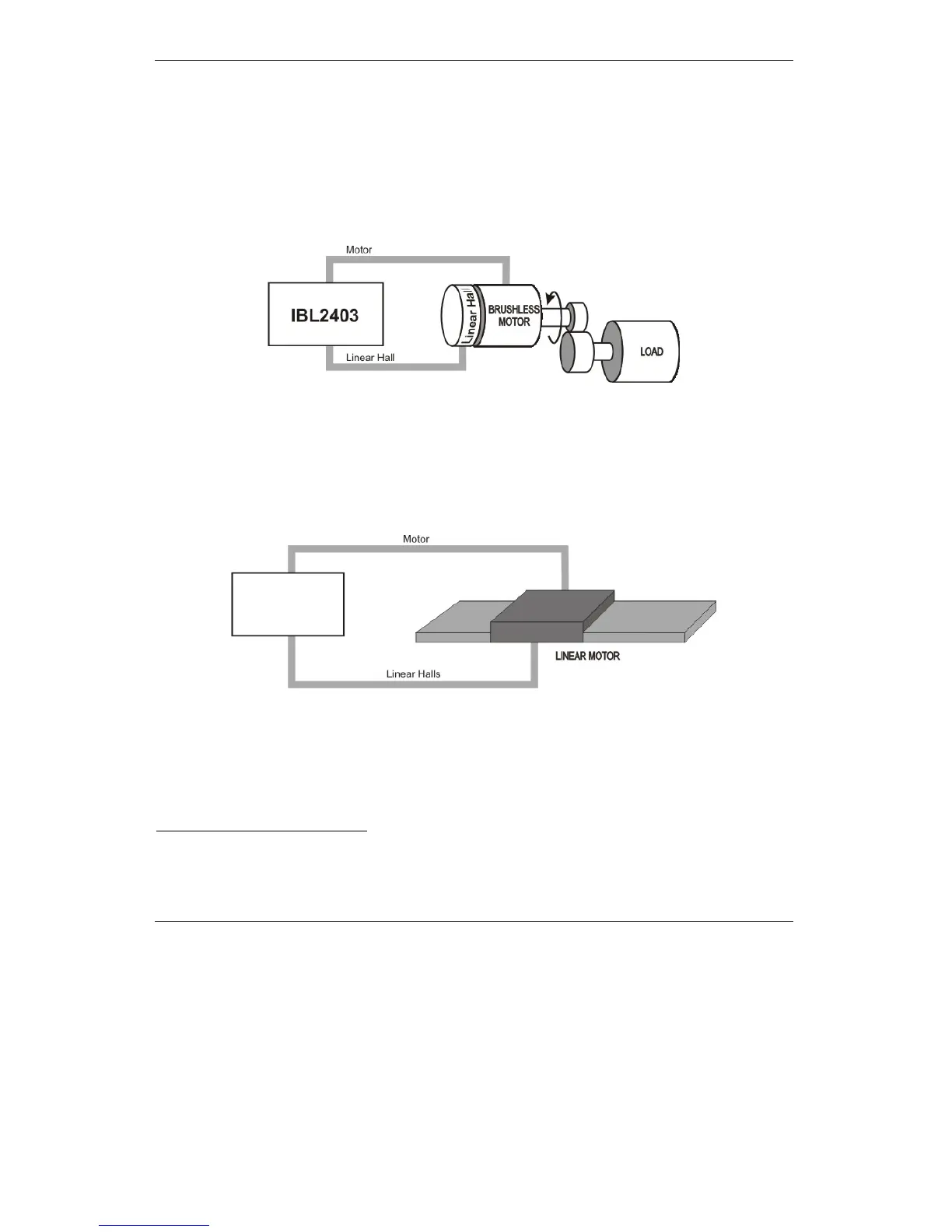
3. Position, speed or torque control of a brushless AC rotary motor with linear Hall
signals
2
. The brushless motor is vector controlled like a permanent magnet synchronous
motor. It works with sinusoidal voltages and currents. Scaling factors take into account
the transmission ratio between motor and load (rotary or linear). Therefore, the motion
commands (for position, speed and acceleration) expressed in SI units (or derivatives)
refer to the load
1
, while the same commands, expressed in IU units, refer to the motor.
Figure 2.3. Brushless AC rotary motor with linear Hall signals.. Position/speed/torque control
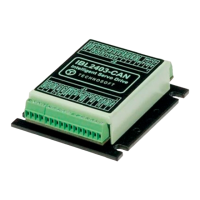
4. Position, speed or torque control of a brushless AC linear motor with linear Hall
signals
2
. The brushless motor is vector controlled like a permanent magnet synchronous
motor. It works with sinusoidal voltages and currents. Scaling factors take into account
the transmission ratio between motor and load (rotary or linear). Therefore, the motion
commands (for position, speed and acceleration) expressed in SI units (or derivatives)
refer to the load, while the same commands, expressed in IU units, refer to the motor.
Figure 2.4. Brushless AC linear motor with linear Hall signals.. Position/speed/torque control
5. Position, speed or torque control of a DC brushed rotary motor with an incremental
quadrature encoder on its shaft. Scaling factors take into account the transmission ratio
between motor and load (rotary or linear). Therefore, the motion commands (for position,
1
Motion commands can be referred to the motor by setting in EasySetUp a rotary to rotary transmission with ratio 1:1
2
Available only for the IBL2403 CAN executions
IBL2403