1.1. Introduction
1.1.1 The Robot
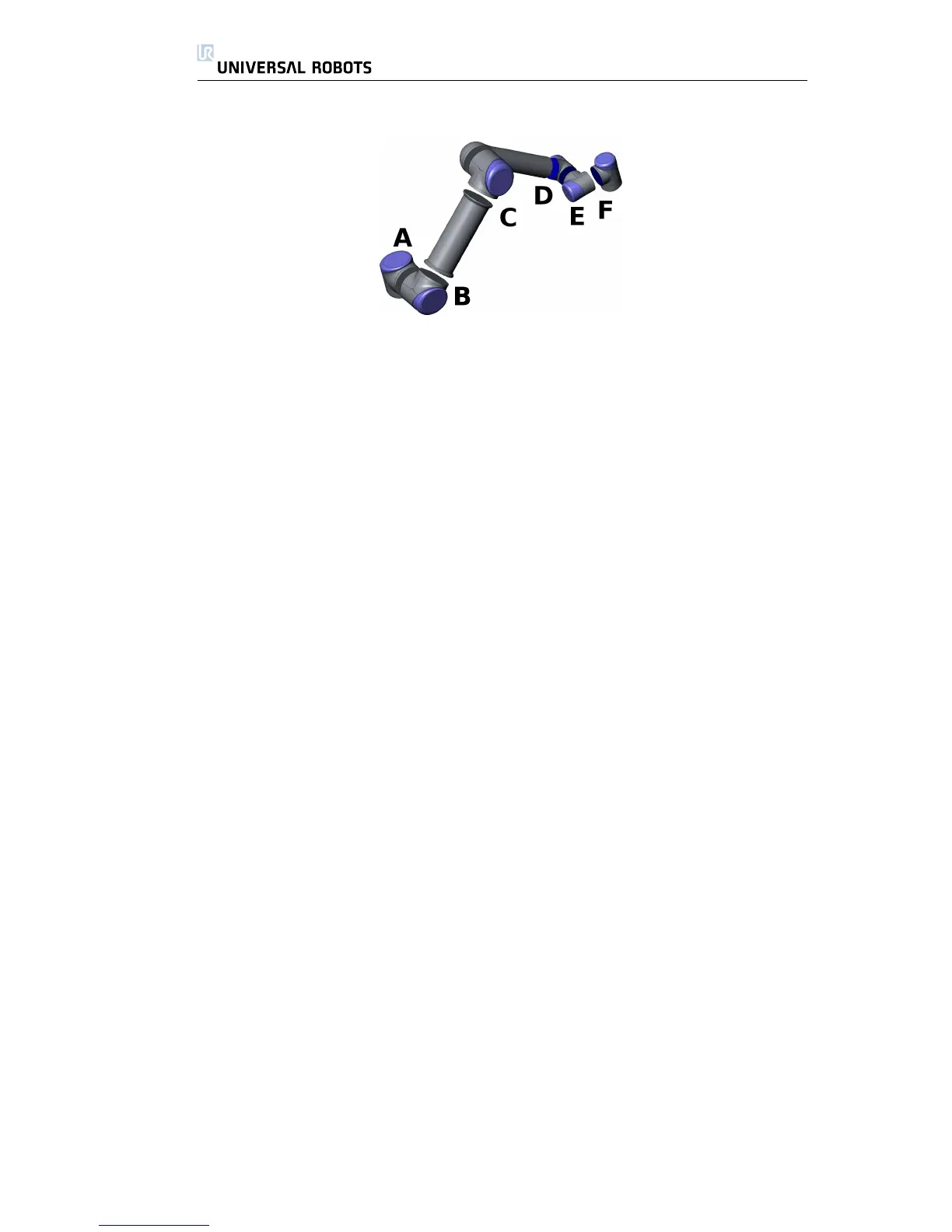
The robot itself is an arm composed of extruded aluminum tubes and joints. The
joints are named A:Base, B:Shoulder, C:Elbow and D,E,F:Wrist 1,2,3. The Base
is where the robot is mounted, and at the other end (Wrist 3) the tool of the
robot is attached. By coordinating the motion of each of the joints, the robot
can move its tool around freely, with the exception of the area directly above
and directly below the robot, and of course limited by the reach of the robot
(1300mm from the center of the base).
1.1.2 Programs
A program is a list of commands telling the robot what to do. The user interface
PolyScope, described in the PolyScope manual, allows people with only little
programming experience to program the robot. For most tasks, programming is
done entirely using the touch panel without typing in any cryptic commands.
Since tool motion is such an important part of a robot program, a way of
teaching the robot how to move is essential. In PolyScope, the motions of the
tool are given using a series of waypoints. Each waypoint is a point in the robot’s
workspace.
Waypoints
A waypoint is a point in the workspace of the robot. A waypoint can be given
by moving the robot to a certain position, or can be calculated by software.
The robot performs a task by moving through a sequence of waypoints. Various
options regarding how the robot moves between the waypoints can be given
in the program.
Defining Waypoints, Moving the Robot. The easiest way to define a waypoint
is to move the robot to the desired position. This can be done in two ways: 1)
By simply pulling the robot, while pressing the ’Teach’ button on the screen (see
the PolyScope manual). 2) By using the touch screen to drive the tool linearly or
to drive each joint individually.
Blends. Per default the robot stops at each waypoint. By giving the robot free-
dom to decide how to move near the waypoint, it is possible to drive through
the desired path faster without stopping. This freedom is given by setting a blend
radius for the waypoint, which means that once the robot comes within a cer-
tain distance of the waypoint, the robot can decide to deviate from the path.
A blend radius of 5-10 cm usually gives good results.
All Rights Reserved
6 UR10