2.3. The Safety Interface
2.3.2 The Safeguard Interface
[TA] Test Output A
[TB] Test Output B
[SA] Safeguard Stop Input A (Positive)
[SB] Safeguard Stop Input B (Negative)
[A] Automatic continue after safeguard stop
[R] Reset safeguard stop
[24V] +24V supply connection for safety devices
[GND] 0V supply connection for safety devices
The Safeguard Interface is used to pause the robot movement in a safe way.
The Safeguard Interface can be used for light guards, door switches, safety PLCs
etc. Resuming from a safeguard stop can be automatic or can be controlled
by a pushbutton, depending on the safeguard configuration. If the Safeguard
Interface is not used then enable automatic reset functionality as described in
section 2.3.3.
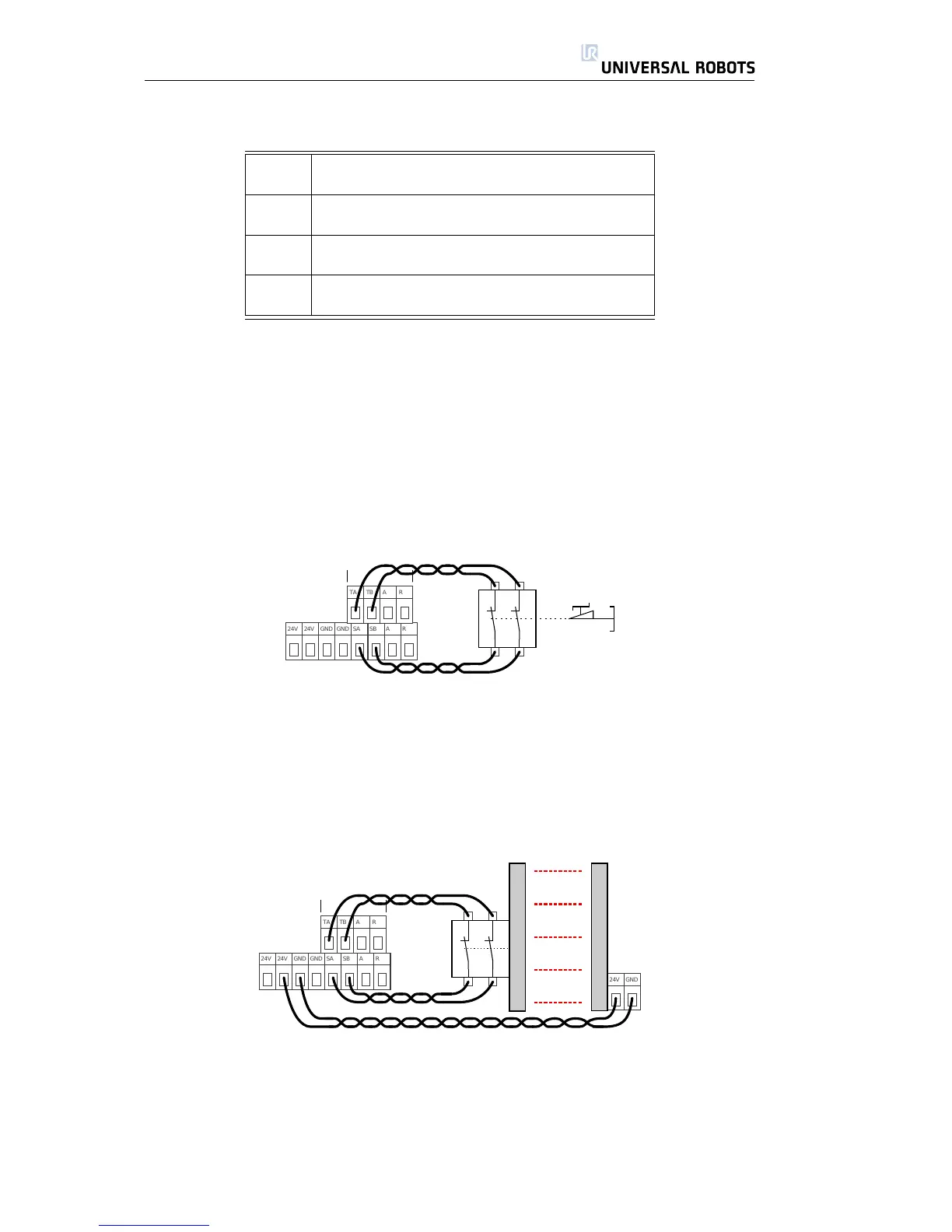
Connecting a door switch
Connecting a door switch or something comparable is done as shown above.
Remember to use a reset button configuration if the robot should not start au-
tomatically when the door is closed again.
Connecting a light guard
How to connect a light guard is shown above. It is also possible to use a
category 1 (ISO 13849-1 and EN 954-1) light guard if the risk assessment allows it.
When connecting a category 1 light guard use TA and SA and then connect TB
and SB with a wire. Remember to use a reset button configuration so that the
safeguard stop is latched.
All Rights Reserved
19 UR10