Rotary indexing ring TR
Controller
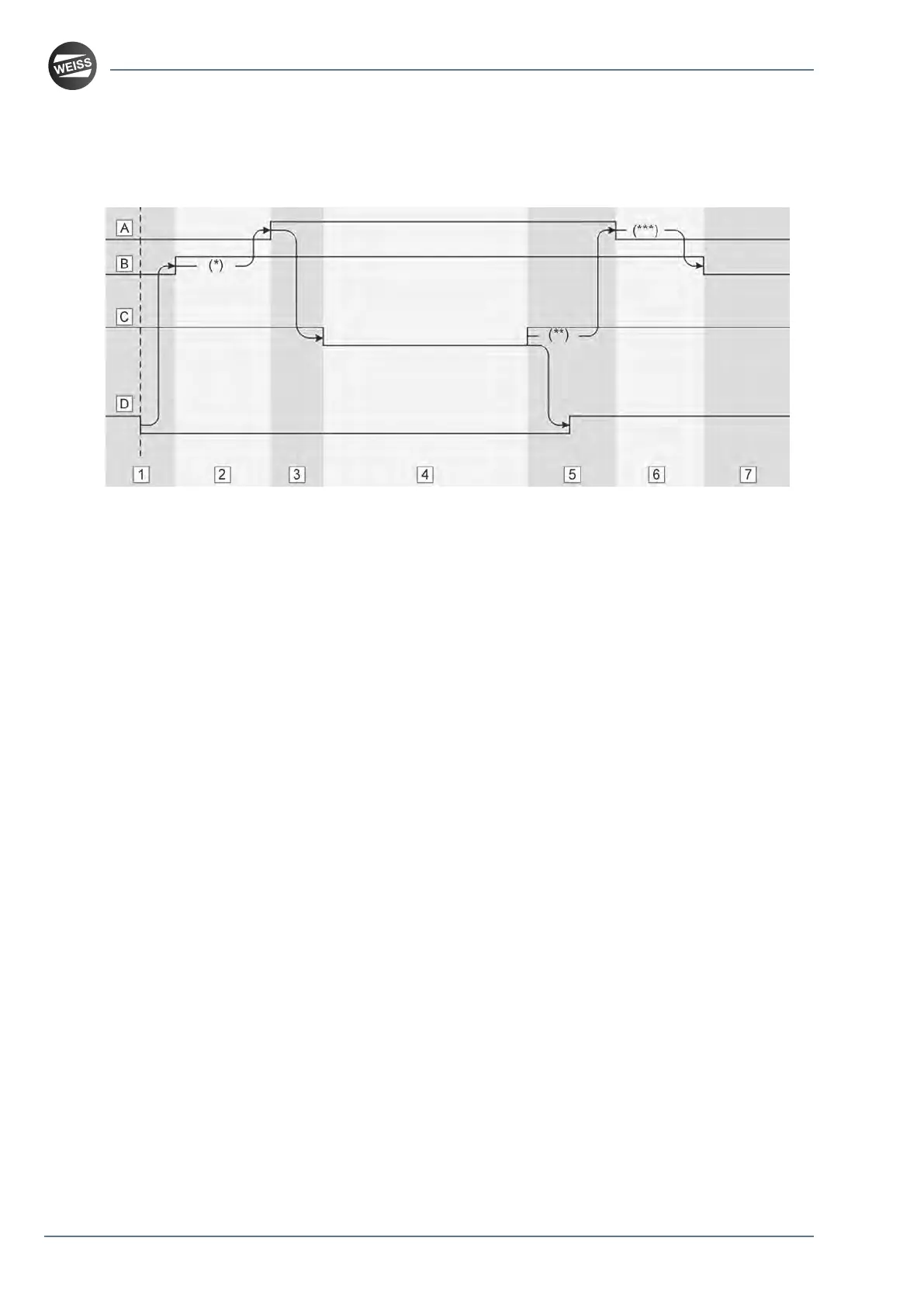
An external controller is a controller provided by the customer.
A Motor 3 The motor starts at the beginning of phase 3. This
moves the position cam out of the measurement
field of the inductive sensor. At the end of phase
3, signal "P" from the inductive sensor is no
longer active.
B Holding brake 4 Output flange rotates
C Signal "P" from inductive sensor 5 Output flange is at a standstill, time delay (**) for
deceleration of the motor is running. The time
delay depends, among other things, on the speed
and the indexing stops.
D Process 6 Time delay (***) for application of the holding
brake is running. The time delay depends, among
other things, on the speed and the indexing stops.
1 Start signal beginning of cycle 7 Product ready for the next cycle. Signal "P" from
the inductive sensor is active (position cam in
measurement field).
2 Time for releasing the holding brake (*).
WEISS motor
Type: 71L = 30 ms
WEISS motor
Type: 71V / 80L / 80V / 90L / 90V /100L = 90 ms
Third-party motor
This time results from the physical design of the
holding brake (refer to the documentation of the
manufacturer).
Overtravel of the stop position can be caused by contact erosion of the contacts of the motor contactor.
1. Check the motor contactor (see documentation of the manufacturer).
44 / 79
Mounting instructions_062019_4.0_en