8-45
8
ROBOT LANGUAGE
8-5 Sample Programs
8-5-12
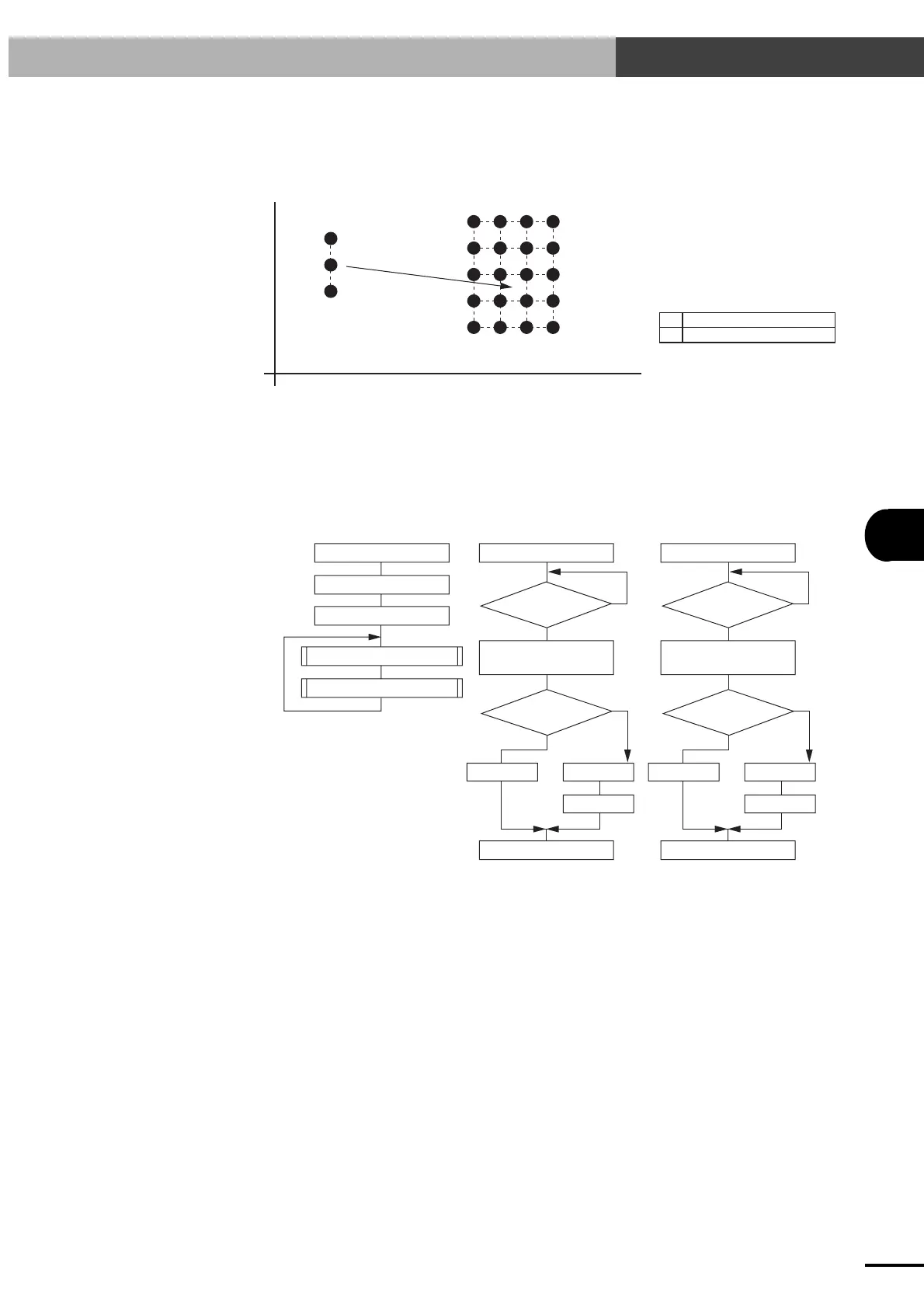
Picking up workpieces from a 1×3 pallet conveyed by the
conveyor and placing them on a 5×4 transfer pallet
Point C (=P249)
Point D (=P250)
Point A (=P247)
Point B (=P248)
Y
X
Point b (=P252)
Point a (=P251)
General-purpose input
DI0 Supply pallet 1:Set 0:NO
DI1 Transfer pallet 1:Set 0:NO
■ Teaching each point of P247 to P252 should be completed beforehand in PNT (point)
mode. (Supply pallet is defined as pallet number 0, and transport pallet as pallet number
1 in this example.)
(* Since the supply pallet is a one-dimensional matrix, input of P253 and P254 is not
necessary.)
N
N
Y
Y
N
N
Y
Y
Start
Pallet definition
Initialization of variables
Supply pallet routine call
Transport pallet routine call
Supply pallet routine
Pallet set ?
Move to supply pallet
and pick up workpiece
Variable C=3?
C←C+1
Eject pallet
C=1
Routine end
Transfer pallet routine
Pallet set ?
Move to transport pallet
and place workpiece
Variable D=20?
D←D+1
Eject pallet
D=1
Routine end
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com