51
CHAPTER2 PROFIBUS Unit
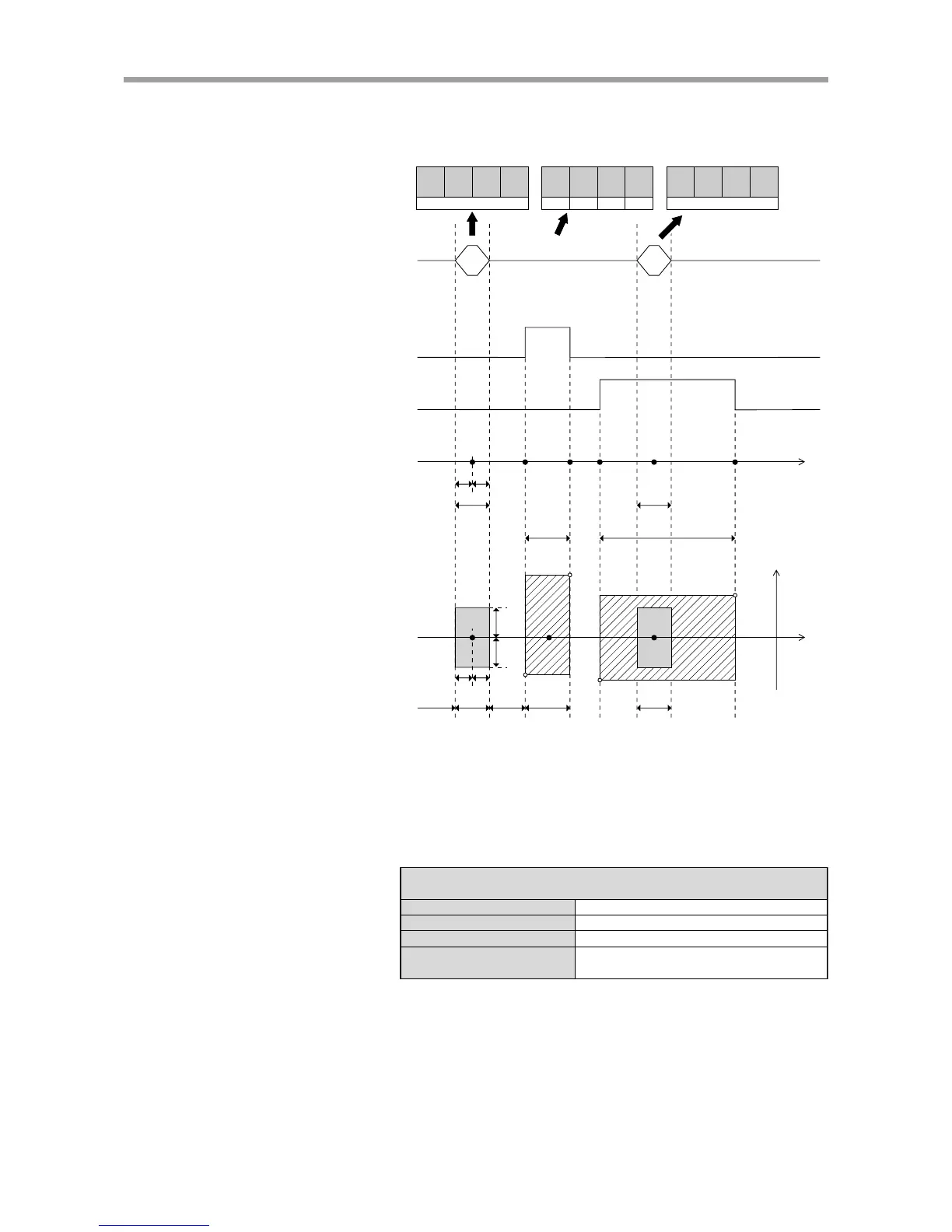
(3) Outputting the corresponding point number by the point zone output
function
Zone outputs (ZONE 0, ZONE 1) are also explained here.
a: X-axis position judgment parameter range
b: Y-axis position judgment parameter range
(In this case, this is the OUT valid position range.)
PO
203
(2
3
)
PO
202
(2
2
)
PO
201
(2
1
)
PO
200
(2
0
)
PO
203
(2
3
)
PO
202
(2
2
)
PO
201
(2
1
)
PO
200
(2
0
)
PO200 to 203
(Target position's point number
outputs 200 to 203)
ZONE0 (Zone output 0)
ZONE1 (Zone output 1)
Current robot position
*Positive logic
*Positive logic
aa
X+
Pm P902
Point output
(point n)
m-No. is output as binary value
OFF OFF OFF OFF
n-No. is output as binary value
Current robot position
aa
Pm
* The number of target point number outputs that can be used depends on I/O assignment type.
qwe
r
t
X+
b
b
P900
Zone output range
* For single-axis type
* For dual-axis type
Precondition: 1) The following steps are explained assuming that the I/O assign-
ment selection parameter (single-axis controllers: PRM59, dual-
axis controllers: PRM26) is set to 221.
I/O assignment type
Permissible number of movement points
Point output selection
Point zone judgment method
(position judgment parameter)
When I/O assignment selection parameter = 221
(single-axis controllers: PRM59, dual-axis controllers: PRM26)
Type 2 (Point No. output type)
16 points
Point zone output
OUT valid position
2) The Zone 0 output and Zone 1 output are enabled and set to posi-
tive logic output by the Zone output selection parameter (single-
axis controllers: PRM53, dual-axis controllers: PRM24).
(1) Target position's point number outputs PO200 to PO203 are off since the cur-
rent robot position is not within the point zone output range. ZONE 0 and
ZONE 1 output signals are also off since the robot does not yet enter the zone
output range.