nment type.
q w r
X+
b
b
Y+
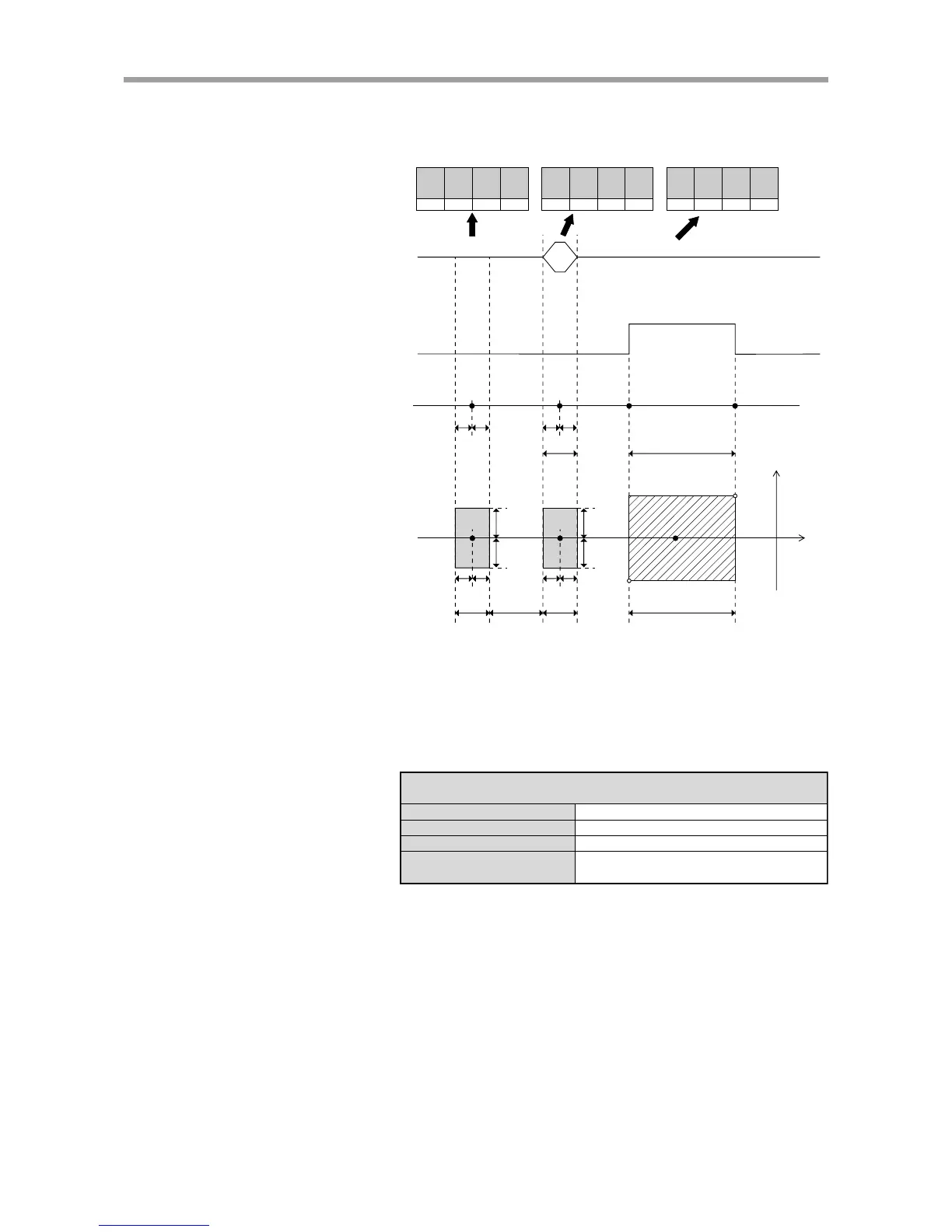
a: X-axis position judgment parameter range
b: Y-axis position judgment parameter range
(In this case, this is the OUT valid position range.)
OFF OFFON ONOFF OFF OFF OFFOFFOFF OFF OFF
aa
P6
e
Point zone output range
* For single-axis type
* For dual-axis type
Precondition: 1) The following steps are explained assuming that the I/O assign-
ment selection parameter (single-axis controllers: PRM59, dual-
axis controllers: PRM26) is set to 321.
I/O assignment type
Permissible number of movement points
Point output selection
Point zone judgment method
(position judgment parameter)
When I/O assignment selection parameter = 321
(single-axis controllers: PRM59, dual-axis controllers: PRM26)
Type 2 (Point No. output type)
16 points
Movement point zone output
OUT valid position
2) The Zone 0 output is enabled and set to positive logic output by the
Zone output selection parameter (single-axis controllers: PRM53,
dual-axis controllers: PRM24).
3) Set the movement point as P6.
(1) Although the robot is within the P1 ± OUT valid position range (point zone
output range), all the PO200 to PO203 target position point number outputs are
off because P1 is not the movement point. Moreover, the ZONE 0 output is
also off because the robot is not within the specified zone output range.
(2) All the PO200 to PO203 target position point number outputs are off because
the robot is not within the point zone output range. Moreover, the ZONE 0
output is also off because the robot is not within the specified zone output
range.