4.4 MP2000 Series Machine Controller Parameter Details
4.4.3 Motion Monitoring Parameter Details
4-70
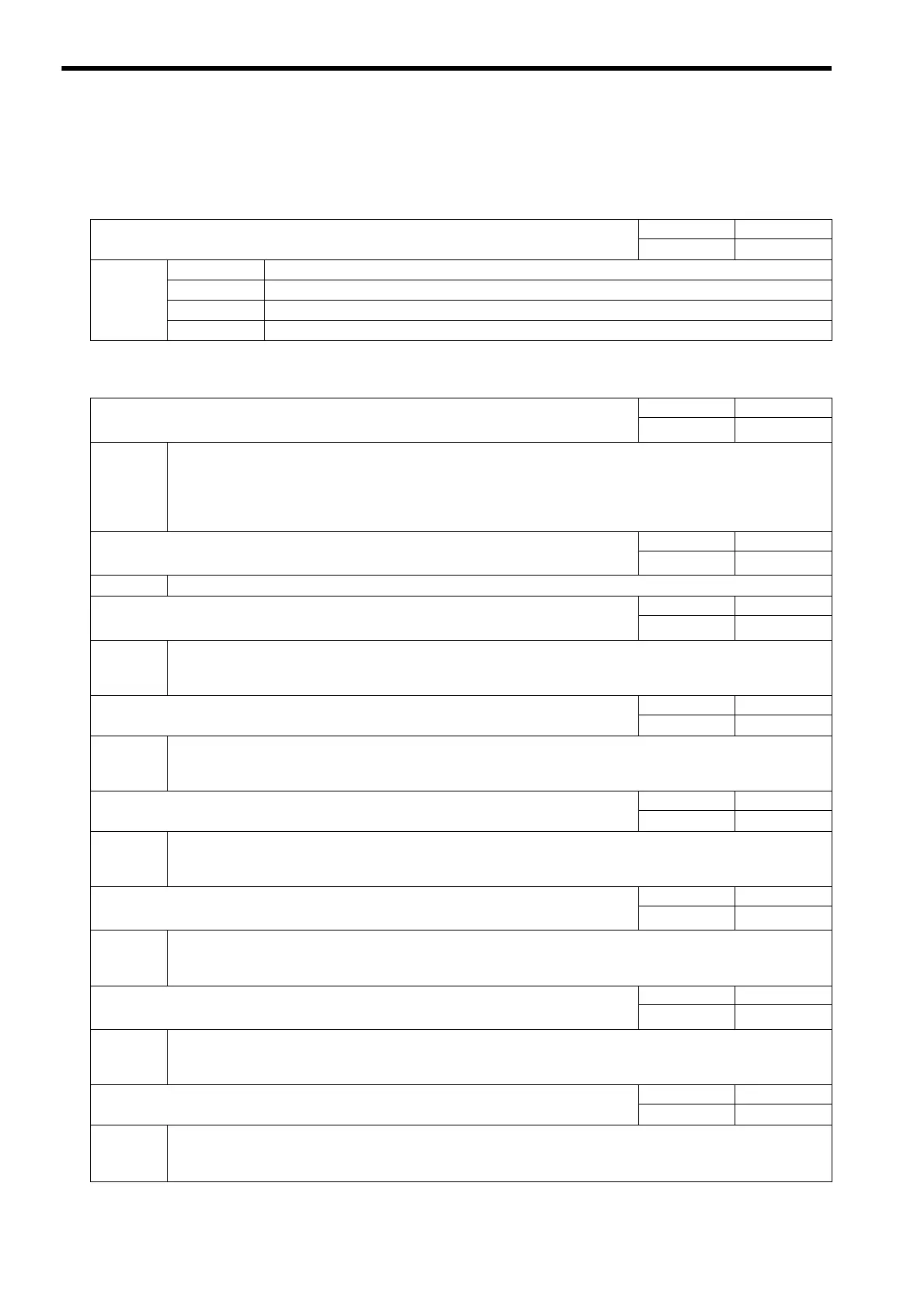
( 15 ) Servo Driver User Monitor Information
The Monitor Selection made by the user when using a SERVOPACK for MECHATROLINK communication is stored
in this parameter.
( 16 ) Servo Driver Information 2
IW2F
Servo Driver User Monitor Information
Range Unit
−−
Description
Bit 0 to Bit 3 Monitor 1
Bit 4 to Bit 7 Monitor 2
Bit 8 to Bit B Monitor 3
Bit C to Bit F Monitor 4
IL30
Servo Driver User Monitor 2
Range Unit
-2
31
to 2
31
−1
−
Description
Stores the result of the selected monitor.
This parameter stores the result of the monitor selected for Monitor 2 in the Servo User Monitor Setting (setting parame-
ter OW4E, bits 4 to 7).
This parameter can be used when the communication method is MECHATROLINK-I or MECHATROLINK-II, 17-byte
Mode and bit 0 of OW02 is set to 1 (1: Enabled).
IL32
Servo Driver User Monitor 3
Range Unit
-2
31
to 2
31
−1
−
Description
Used by the system.
IL34
Servo Driver User Monitor 4
Range Unit
-2
31
to 2
31
−1
−
Description
Stores the result of the selected monitor.
This parameter stores the result of the monitor selected for Monitor 4 of the Servo User Monitor Setting (setting parame-
ter OW4E, bits C to F).
IW36
Servo Driver User Constant No.
Range Unit
0 to 65535 −
Description
Stores the number of the parameter being processed.
This parameter stores the number of the SERVOPACK parameter being read or written using the MECHATROLINK
command area. Refer to Chapter 6 Motion Commands for details.
IW37
Supplementary Servo Driver User Constant No.
Range Unit
0 to 65535 −
Description
Stores the number of the parameter being processed.
This parameter stores the number of the SERVOPACK parameter being read or written using the MECHATROLINK sub-
command area. Refer to Chapter 6 Motion Commands for details.
IL38
Servo Driver User Constant Reading Data
Range Unit
-2
31
to 2
31
−1
−
Description
Stores the data of the parameter being read.
This parameter stores the data of the SERVOPACK parameter read using the MECHATROLINK command area. Refer to
Chapter 6 Motion Commands for details.
IL3A
Supplementary Servo Driver User Constant Reading Data
Range Unit
-2
31
to 2
31
−1
−
Description
Stores the data of the parameter being read.
This parameter stores the data of the SERVOPACK parameter read using the MECHATROLINK subcommand area.
Refer to Chapter 6 Motion Commands for details.
IW3F
Motor Type
Range Unit
0, 1 −
Description
Stores the type of motor that is actually connected.
0: Rotation type motor
1: Linear motor