6.4 Motion Subcommand Details
6.4.3 Write User Constant (PRM_WR)
6-105
6.4.3 Write User Constant (PRM_WR)
The PRM_WR command writes the setting of the SERVOPACK parameter using the specified parameter number,
parameter size, and setting data. The write destination is in the SERVOPACK's RAM.
This command will end with a Command Error Completed Status if it is executed with a communication method
other than MECHATROLINK-II 32-byte Mode.
( 1 ) Executing/Operating Procedure
1.
Check to see if all the following conditions are satisfied.
2.
Set OW0A to 2 to execute the PRM_WR motion subcommand.
The PRM_WR command will write the SERVOPACK parameter.
IW0A will be 2 during command execution.
IW0B, bit 0 will turn ON during the command processing and will turn OFF when the command processing
has been completed.
3.
Set OW0A to 0 to execute the NOP motion command and then complete the writing operation.
( 2 ) Related Parameters
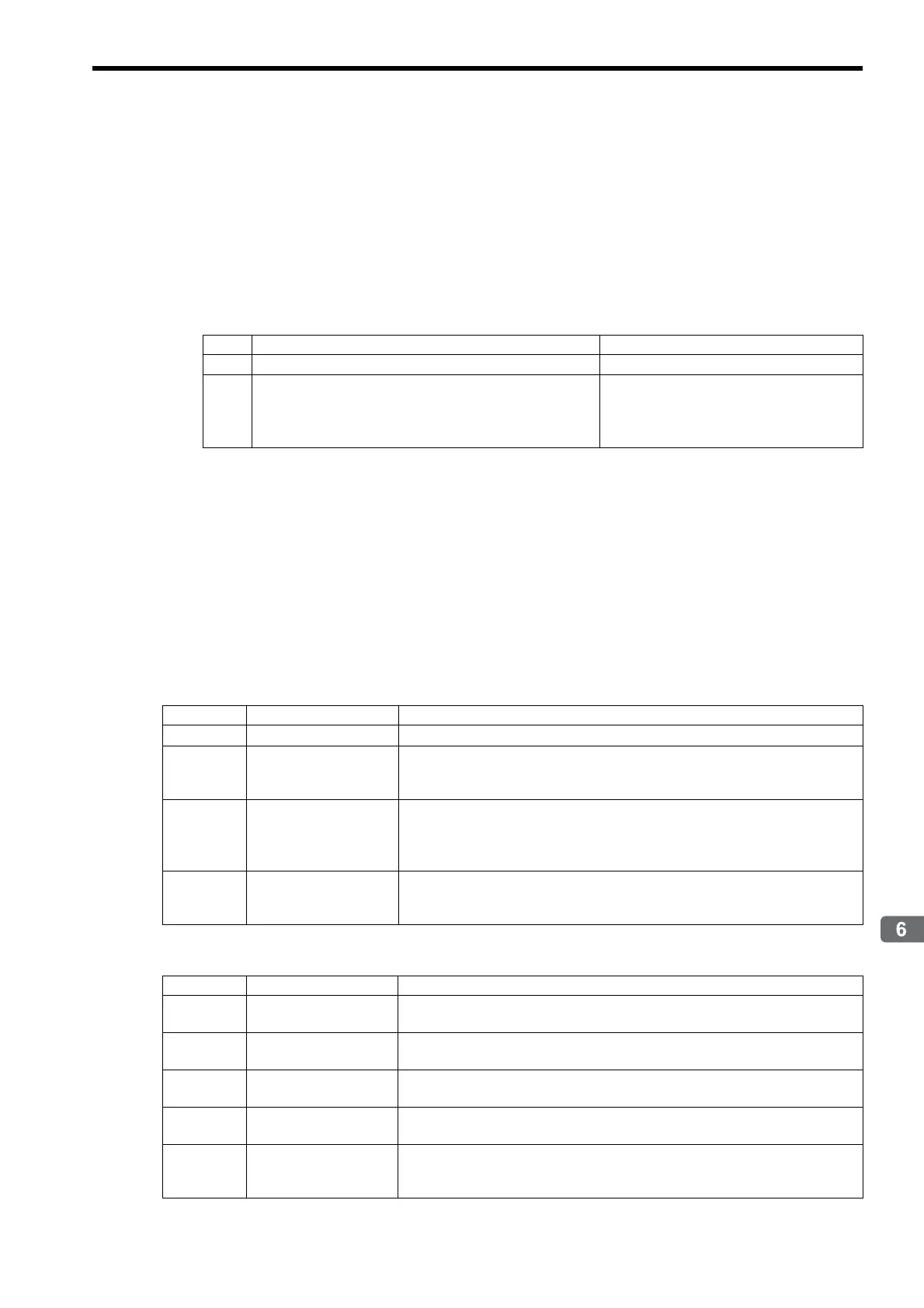
[ a ] Setting Parameters
[ b ] Monitoring Parameters
No. Execution Conditions Confirmation Method
1 Motion subcommand execution has been completed. IW0A is 0 and IW0B, bit 0 is OFF.
2
The OW
54, OW
55, and OL
56 settings have
been completed.
Refer to 6.4.3 ( 1 ) [ a ] Setting Parameters below for
details.
−
Parameter Name Setting Contents
OW0A Motion Subcommand
The SERVOPACK parameter is written when this parameter is set to 2.
OW54
Servo Driver for Assis-
tance User Constant
No.
Set the number of the SERVOPACK parameter to be written.
OW55
Servo Driver for Assis-
tance User Constant
Size
Set the size of the SERVOPACK parameter to be written.
Set the size in words.
The SERVOPACK’s user manual lists the size in bytes, so those values
must be converted to words.
OL56
Servo Driver for Assis-
tance User Constant
Set Point
Set the set value for the SERVOPACK parameter to be written.
Parameter Name Monitoring Contents
IW0A
Motion Subcommand
Response Code
Indicates the motion subcommand that is being executed.
The response code is 2 during PRM_WR command execution.
IW0B
Bit 0
Command Execution
Flag
Turns ON during PRM_WR command execution and turns OFF when execution has
been completed.
IW0B
Bit 3
Command Error
Completed Status
Turns ON if an error occurs during PRM_WR command execution.
Turns OFF when another command is executed.
IW0B
Bit 8
Command Execution
Completed
Turns ON when PRM_WR command execution has been completed.
IW37
Supplementary Servo
Driver User Constant
No.
Stores the parameter number of the SERVOPACK parameter that was written.