Appendix E Fixed Parameter Setting According to Encoder Type and Axis Type
A-20
Appendix E Fixed Parameter Setting According to Encoder Type and
Axis Type
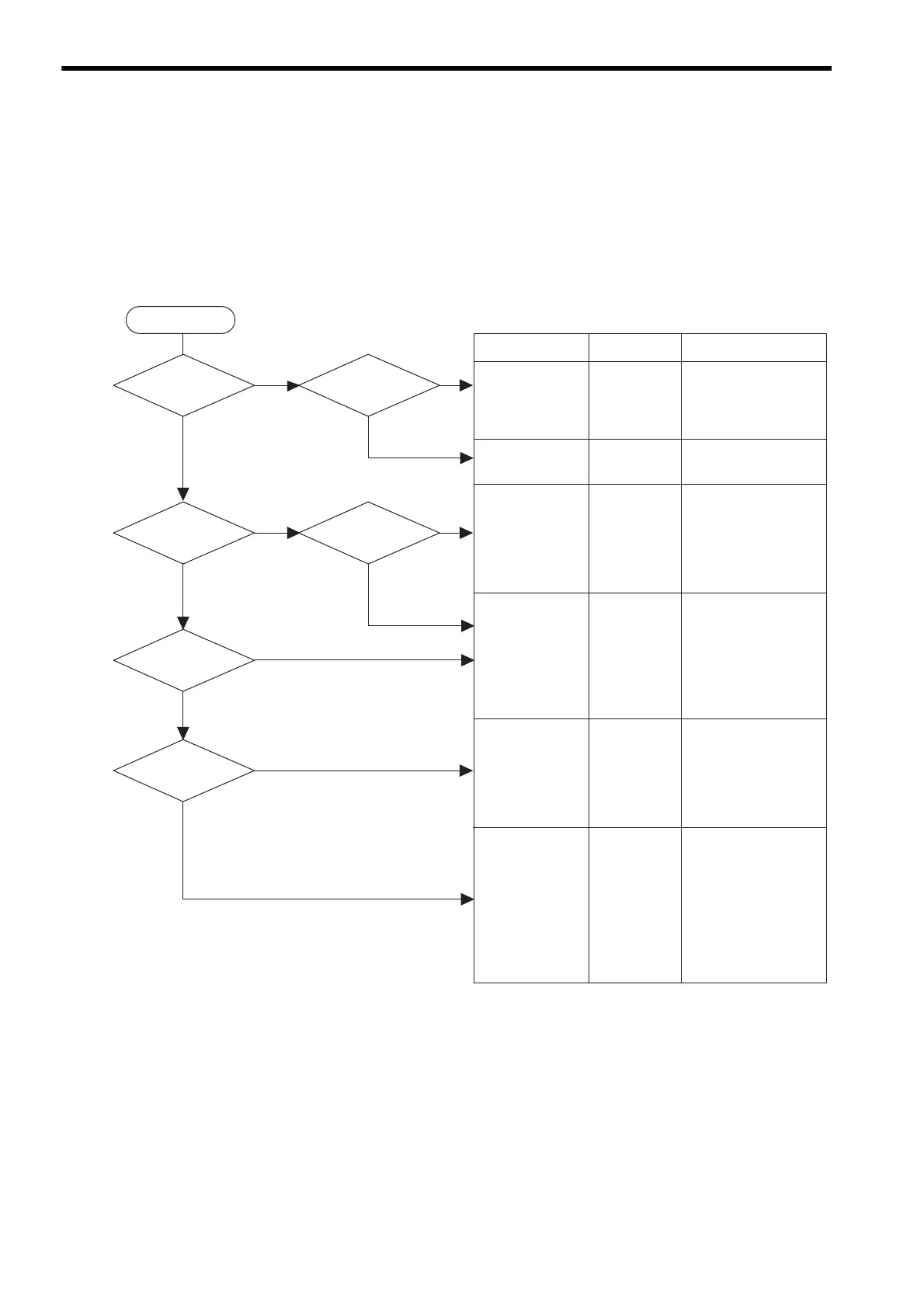
The method of setting or changing the coordinate zero point differs depending on the encoder type, motor type, and
axis type (infinite length axis or finite length axis) to be used. Use the flowchart below to correctly set the fixed param-
eter according to your application.
Absolute encoder ?
NO
YES
Infinite length axis ?
NO
YES
Direct-drive motor ?
NO
YES
Direct-drive motor ?
YES
NO
Infinite length axis ?
START
NO
YES
Simple ABS
applicable ?
YES
NO
Fixed Parameter Setting
No.1, bit 0 = 0
(Finite length axis)
No.1, bit 0 = 0
(Finite length axis)
No.1, bit 0 = 1
(Infinite length axis)
㧗
No.1, bit 9 = 1
(Simple ABS enabled)
No.1, bit 0 = 1
(Infinite length axis)
㧗
No.1, bit 9 = 1
(Simple ABS enabled)
No.1, bit 0 = 1
(Infinite length axis)
㧗
No.1, bit 9 = 0
(Simple ABS disabled)
No.1, bit 0 = 1
(Infinite length axis)
Encoder Type
Incremental
encoder
Absolute
encoder
Absolute
encoder
Absolute
encoder
Absolute
encoder
Motor Type
Any type
Incremental
encoder
Any type
Any type
other than
direct-drive
motor
Direct-drive
motor
Any type
other than
direct-drive
motor
Any type
other than
direct-drive
motor