11.8 Precautions When Using Σ-7-series SGD7S SERVOPACKs with Rotary Servomotors
11.8.1
SGD7S Electronic Gear Ratio Settings
11-31
11.8 Precautions When Using Σ-7-series SGD7S SERVOPACKs with
Rotary Servomotors
11.8.1 SGD7S Electronic Gear Ratio Settings
Set Pn20E (Electronic Gear Ratio (Numerator)) and Pn210 (Electronic Gear Ratio (Denominator)) for the SGD7S as
shown in the following table.
These settings are made automatically if you execute self configuration.
11.8.2 Link Assignment
Use the following settings for the TYPE parameter of the station numbers on the Link Assignment Tab Page of the
MECHATROLINK Detail Definition Window of the MPE720.
These settings are made automatically if you execute self configuration.
11.8.3 Number of Pulses per Motor Rotation
Set Fixed Parameter No. 36 Number of Pulses per Motor Rotation as shown in the following table.
These settings are made automatically if you execute self configuration.
• If you set fixed parameter No. 36 (Number of Pulses per Motor Rotation) to a value of 16777216 (24 bits) or higher,
the monitoring parameters will be as follows:
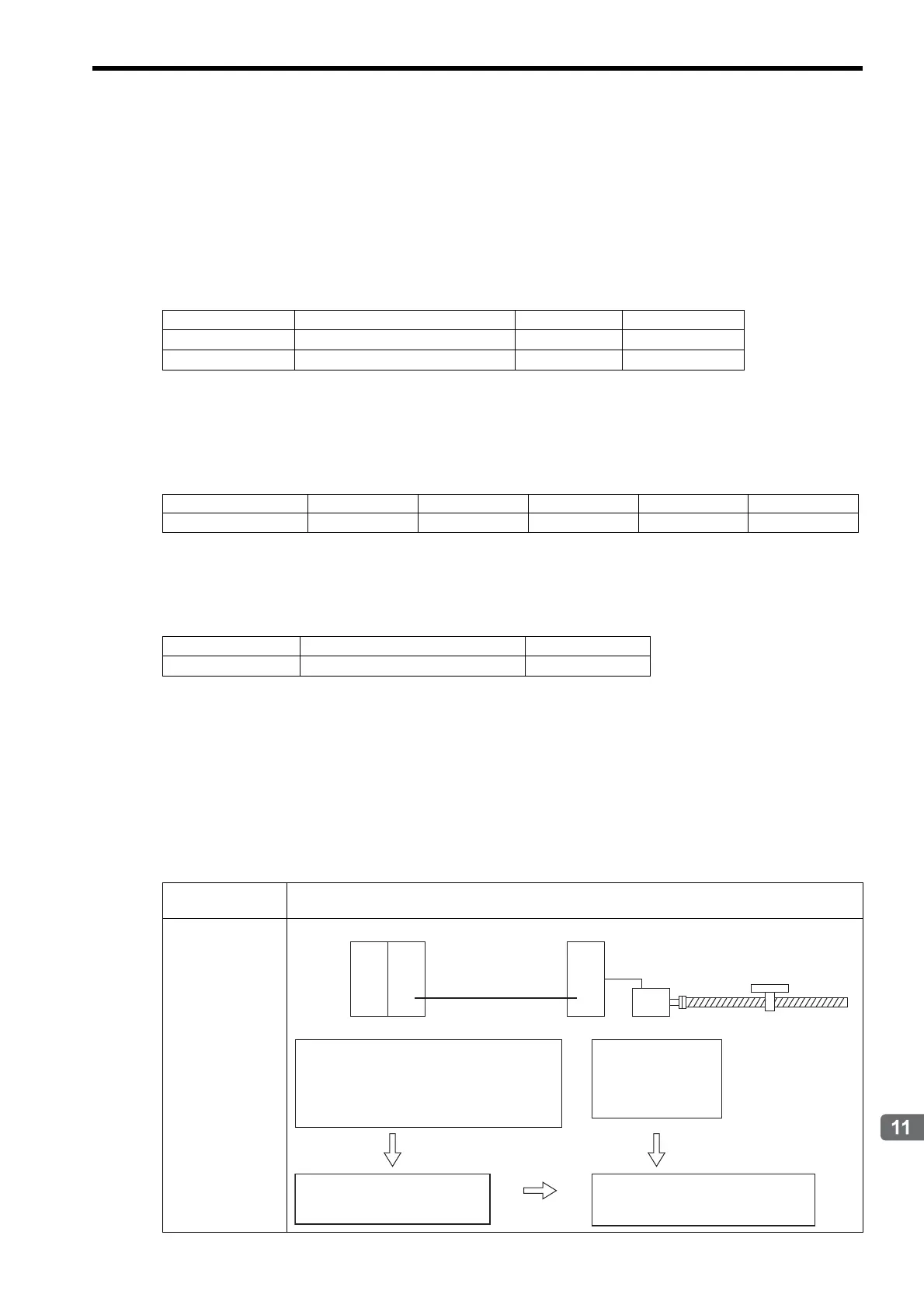
11.8.4 Motion Image
Servo Parameter No. Name Setting Default
Pn20E Electronic Gear Ratio (Numerator) 16 64
Pn210 Electronic Gear Ratio (Denominator) 1 1
TYPE INPUT SIZE OUTPUT SIZE SCAN
SGD7S-****10* Blank Blank Blank Blank High (fixed)
Fixed Parameter No. Name Setting
36 Number of Pulses per Motor Rotation 1048576
IW
00, Bit0
Motion Controller Operation Ready OFF
IW
01
Parameter Number When Range Over is Generated 1036
IL
02, Bit2
Fixed Parameter Error ON
Σ
-7S Electronic
Gear Ratio
Motion Image
16:1
(Pn20E = 16,
Pn210 = 1)
Reference unit selection = mm
Travel distance per machine rotation = 10,000 reference units
Motor gear ratio = 1
Machine gear ratio = 1
Number of pulses per motor rotation = 1,048,576
If a movement of 10,000 reference
units is commanded, 1,048,576
pulses will be output.
Pn20E = 16
Pn210 = 1
A 24-bit encoder
is used.
The motor will rotate one rotation for a
reference of 1,048,576 servo
reference units.
SVB
Σ
-7
MECHATROLINK-II
Motor