6.2 Motion Command Details
6.2.6 Jog Mode (FEED)
6-44
6.2.6 Jog Mode (FEED)
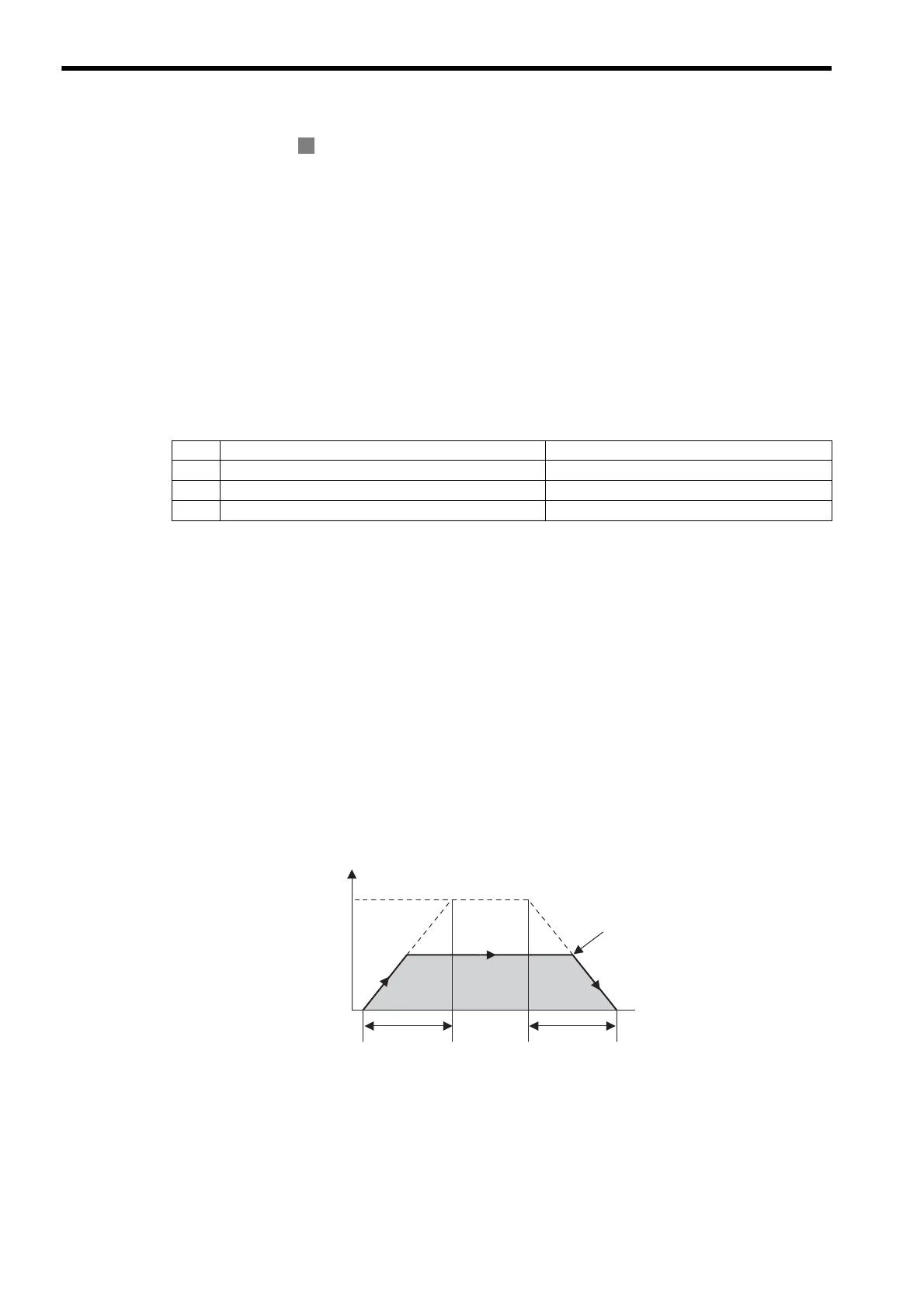
The FEED command starts movement in the specified travel direction at the specified travel speed. Execute the NOP
motion command to stop the operation.
Parameters related to acceleration and deceleration are set in advance.
When using an SGDV or SGD7S SERVOPACK, the torque limit can be set and changed during SERVOPACK opera-
tion. For details, refer to Setting and Changing Torque Limit during SGDV or SGD7S SERVOPACK Operations of
4.4.2 ( 12 ). Also, refer to Precautions of 6.2.1 ( 3 ).
For more information on the maximum allowable value for acceleration and deceleration, refer to Changing the max-
imum value of acceleration and deceleration for SGDV or SGD7S SERVOPACKs of 4.4.2 ( 23 ).
( 1 ) Executing/Operating Procedure
1.
Check to see if all the following conditions are satisfied.
* This condition is a basic execution condition. Refer to Chapter 7 Switching Commands during Execution when
changing the command being executed to a FEED command.
2.
Set the following motion setting parameters.
Moving Direction (JOG/STEP): OW09, bit 2
Speed Reference Setting: OL10
Filter Type Selection: OW03, bits 8 to B
Speed Loop P/PI Switch: OW01
The speed reference can be changed during operation.
3.
Set OW08 to 7 to execute the FEED motion command.
JOG operation will start. IW08 will be 7 during the execution.
4.
Set OW08 to 0 to execute the NOP motion command.
IW0C, bit 1 turns ON and the JOG operation has been completed.
( 2 ) Holding
Holding execution is not possible during FEED command execution. The Holds a Command bit (OW09, bit 0) is
ignored.
No. Execution Conditions Confirmation Method
1 There are no alarms. Both IL02 and IL04 are 0.
2 The Servo ON condition. IW00, bit 1 is ON.
3 Motion command execution has been completed. IW08 is 0 and IW09, bit 0 is OFF.
Position
Speed (%)
(100%)
0
Time (t)
Travel speed
Rated speed
NOP Command
Straight Line
Acceleration Time
Constant
Straight Line
Deceleration Time
Constant