6.2 Motion Command Details
6.2.2 Latch Target Positioning (EX_POSING) (External Positioning)
6-12
5.
Set OW08 to 0 to execute the NOP motion command to complete the external positioning opera-
tion.
( 2 ) Holding
Axis travel can be stopped during command execution and then the remaining travel can be restarted. A command is
held by setting the Holds a Command bit (OW09, bit 0) to 1.
• Set the Holds a Command bit (OW09, bit 0) to 1. The axis will decelerate to a stop.
• When the axis has stopped, the Command Hold Completed bit (IW09, bit 1) will turn ON.
• Reset the Holds a Command bit (OW09, bit 0) to 0.
The command hold status will be cleared and the remaining portion of the positioning will be restarted.
( 3 ) Aborting
Axis travel can be stopped during command execution and the remaining travel canceled by aborting execution of a
command. A command is aborted by setting the Interrupt a Command bit (OW09, bit 1) to 1.
• Set the Interrupt a Command bit (OW09, bit 1) to 1. The axis will decelerate to a stop.
• When the axis has stopped, the remain travel will be canceled and the Positioning Completed bit (IW0C,
bit 1) will turn ON.
This type of operation will also be performed if the motion command is changed during axis movement.
( 4 ) Related Parameters
[ a ] Setting Parameters
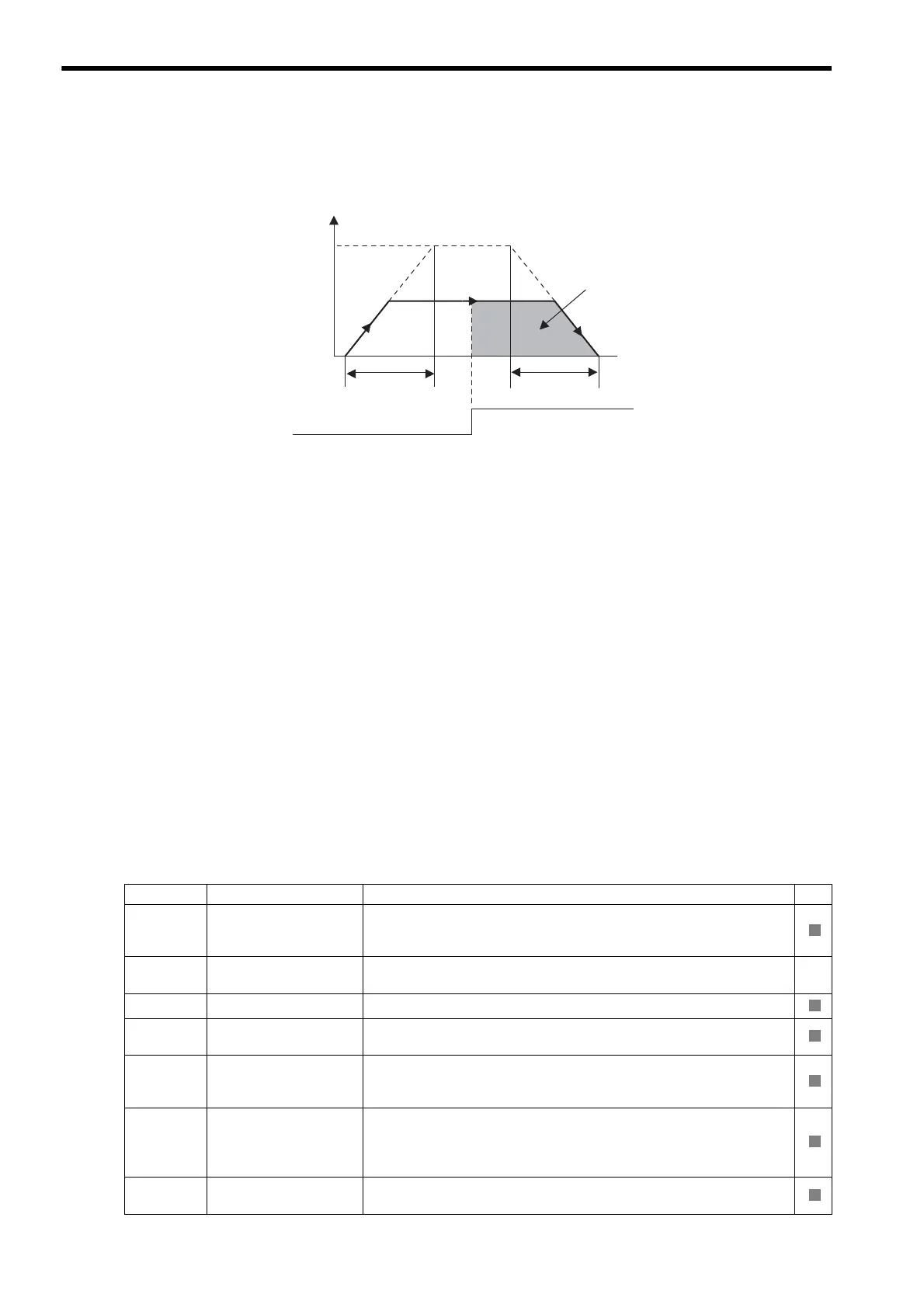
Speed
(%)
(100%)
0
Time (t)
Straight line deceleration time constant
Rated speed
Latch signal
(external positioning signal)
Positioning
speed
External positioning
final travel distance
Straight line acceleration time constant
EX_POSING Operating Pattern
Parameter Name Setting SVR
OW00
Bit 0
Servo ON
Turn the power to the Servomotor ON and OFF.
1: Power ON to Servomotor, 0: Power OFF to Servomotor
Turn ON the power before setting the Motion Command (OW08) to 2.
OW01
Bit 3
Speed Loop
P/PI Switch
Switch the speed control loop between PI control and P control.
0: PI control, 1: P control
−
OW03 Function Setting 1
Set the speed unit, acceleration/deceleration units, and filter type.
OW04 Function Setting 2
Set the external positioning signal.
2: phase-C pulse, 3: /EXT1, 4: /EXT2, 5: /EXT3
OW08 Motion Command
The positioning starts when this parameter is set to 2.
The operation will be canceled if this parameter is set to 0 during EX_POSING
command execution.
OW09
Bit 0
Holds a Command
The axis will decelerate to a stop if this bit is set to 1 during execution of
EX_POSING command execution.
The positioning will restart if this bit is reset to 0 when a command is being
held.
OW09
Bit 1
Interrupt a Command
The axis will decelerate to a stop if this bit is set to 1 during EX_POSING com-
mand execution.